Krok 1:
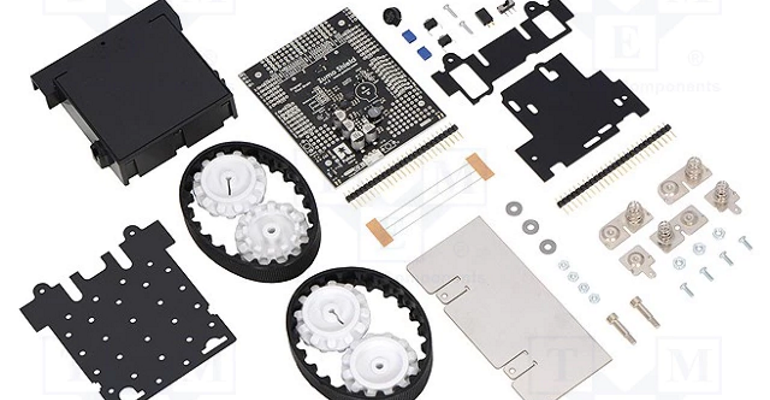
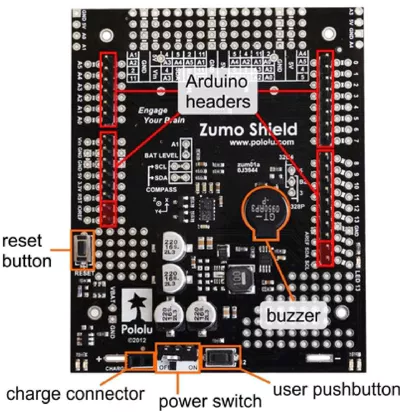
Przylutuj brzęczyk oraz listwy kołkowe do płytki PCB zestawu Zumo Robot Kit v1.2. Pamiętaj, że możesz również przylutować inne podzespoły, np. czujniki, aby zindywidualizować zestaw. Z założenia płytka PCB osadzana jest na czarnej płytce dystansowej, która dostępna jest, gdy mowa o Zumo Robot Kit v1.2, w ramach tego zestawu (patrz kroki: 4 i 5).
Krok 2:
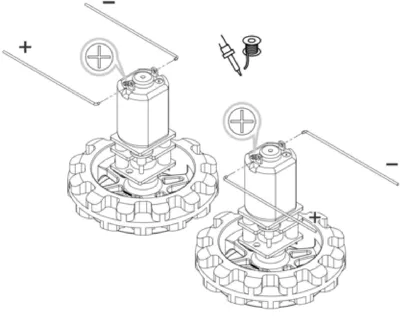
Przylutuj po 2 przewody do silniczków elektrycznych, jak pokazano na poniższych zdjęciach.

Krok 3:
Umieść silniczki elektryczne w kanale z przodu podwozia.
Krok 4:
Przykryj podwozie i silniczki elektryczne czarną płytką dystansową, po czym weź i przymocuj po jednej nakrętce M3 w obu nadkolach przednich kół.
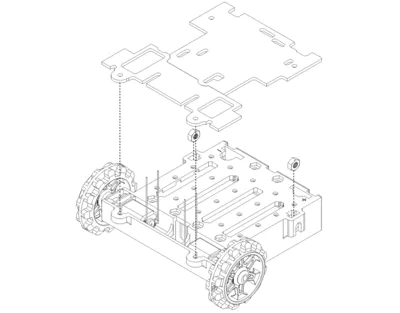
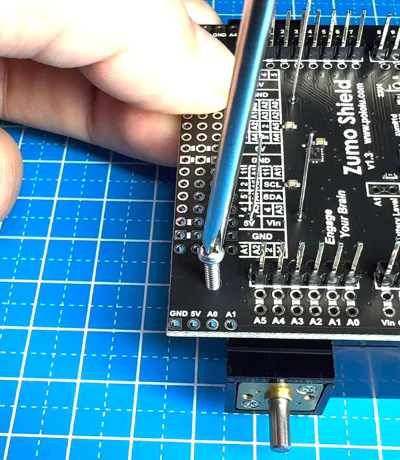
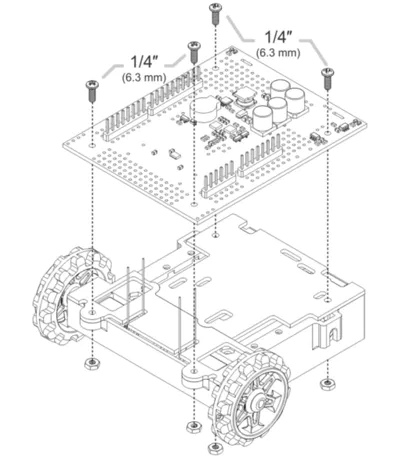
Krok 5:
Teraz należy zamontować płytkę PCB na górze podwozia. Pamiętaj o przełożeniu przewodów silniczków przez odpowiednie otwory. Przymocuj płytkę PCB do podwozia za pomocą 4 śrub.
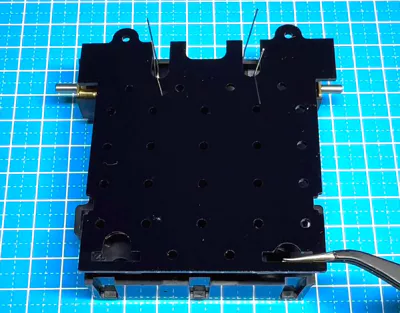
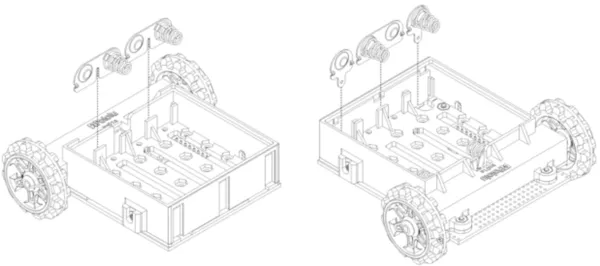
Krok 6:
Obróć podwozie i zamontuj styki baterii tak, jak pokazano poniżej. Trzy podwójne styki należy mocno wcisnąć, aż zrównają się z wewnętrzną powierzchnią komory baterii. Dwa pojedyncze styki z kolei należy włożyć do komory baterii tak, by ich wypustki lutownicze wystawały przez otwory w górnej części obudowy. Zanim przylutujesz 2 pojedyncze styki do płytki PCB poleca się tymczasowo przykleić je taśmą lub przytrzymać na miejscu, by łatwo umieścić w komorze baterie wymagane do zasilania Zumo Robot Kit v1.2.

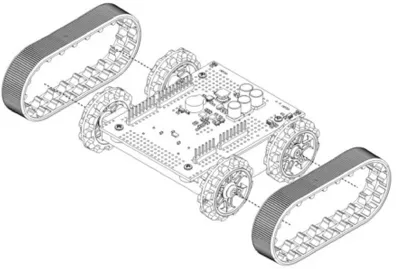
Krok 7:
Zamontuj opony i gąsienice.
Krok 8:
Pobierz bibliotekę Zumo w oprogramowaniu Arduino IDE i prześlij przykładowy kod do swojej płytki Arduino. Po wykonaniu tej czynności umieść swoją płytkę Arduino na płytce PCB, która jest zamocowana na podwoziu. Upewnij się, że w komorze znajdują się baterie.

Krok 9:
Włącz robota i zacznij nim sterować. Przyjemnej zabawy!