
- Mikrokontroler ATmega8
- Zasilanie 12 VDC/0,5 A
- Wyświetlanie zegara w postaci cyfrowej, analogowej lub naprzemiennie
- Płytka wskazówki osadzona na wirniku wentylatora komputerowego
- Przeniesienie zasilania i sygnałów z klawiszy z użyciem transformatora
Zegar składa się z dwóch odseparowanych galwanicznie modułów. Pierwszy z nich jest układem nazywanym dalej „zasilaczem” i jest nieruchomą częścią zegara. Jego zadaniem jest zasilenie części wirującej oraz umożliwienie ustawiania czasu, regulacja prędkości obrotowej, i synchronizacja wirnika. Drugi moduł jest częścią wirującą zamocowaną na wirniku, nazywaną dalej „wskazówką”. Jest ona odpowiedzialna za wyświetlanie czasu.
Zasilacz
Analizę schematu zegara zacznijmy od zasilacza (rysunek 1). Jego podstawowymi elementami są generator i wzmacniacz zasilający uzwojenie pierwotne transformatora powietrznego (zdecydowałem się zastosować transformator bezrdzeniowy ze względu na dużą awaryjność rozwiązania ze szczotkami oraz mniejszy hałas). W roli generatora zastosowano popularny, tani kontroler PWM – UC3845. Częstotliwość pracy wynoszącą około 140 kHz wyznaczają elementy C7 i P1, natomiast współczynnik wypełnienia jest bliski 50%.
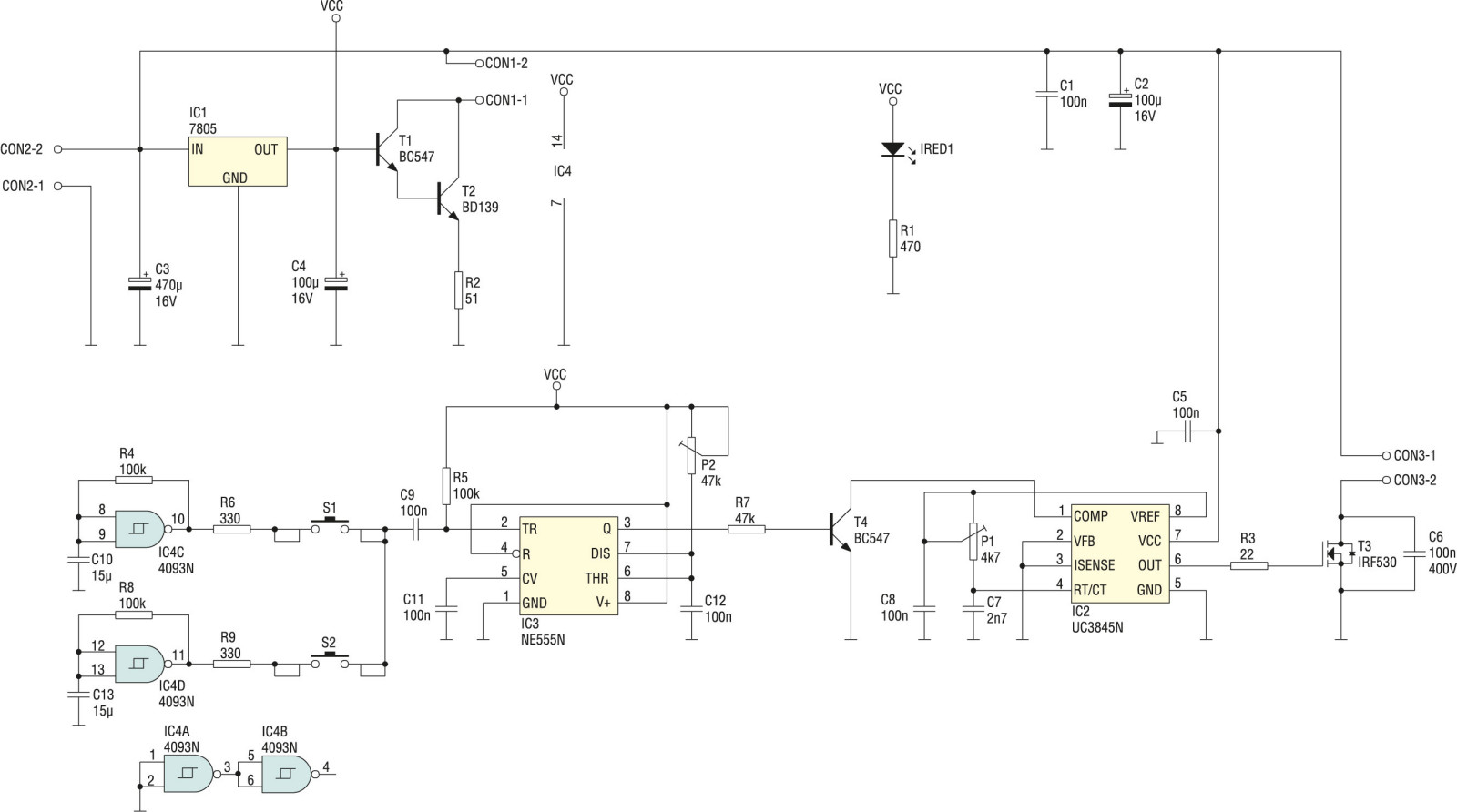
Wyjście układu IC2 typu push-pull idealnie nadaje się do bezpośredniego sterowania bramką tranzystora MOSFET. Rezystor R3 ogranicza maksymalny prąd przeładowania bramki. Jako stopień mocy zasilający cewkę zastosowano wzmacniacz pracujący w klasie E.
Naley w tym miejscu omówić krótko zasadę działania wspomnianego wzmacniacza. Załóżmy sytuacje początkową, w której tranzystor T3 jest załączony, w uzwojeniu pierwotnym transformatora narasta natężenie prądu, a napięcie na kondensator C6 jest równe zeru.
Wyłączamy tranzystor T3. Prąd płynący przez uzwojenie pierwotne musi płynąc nadal (taką sytuację wymusza pole magnetyczne wokół cewki), lecz teraz ładuje on kondensator C6. W chwili kiedy prąd uzwojenia pierwotnego spadnie do zera, napięcie na kondensatorze C6 osiągnie wartość maksymalną (dużo wyższą od napięcia zasilania) i prąd w uzwojeniu pierwotnym zacznie płynąć w przeciwna stronę, rozładowując tym samym kondensator C6. Bardzo ważne jest powtórne załączenie T3 w momencie, w którym napięcie na C6 spadnie do zera. Niespełnienie tego warunku znacznie zwiększy straty mocy w tranzystorze T3, a w skrajnym przypadku spowoduje jego uszkodzenie.
Na schemacie modułu zasilającego można również znaleźć źródło prądowe, którego obciążeniem jest silnik zegara, zbudowane na tranzystorach T1-T2 (tworzą one typowy układ Darlingtona). Przybliżoną wartość prądu źródła można wyznaczyć ze wzoru IO=(UB–2×UBE)/R2 i należy dobrać ja eksperymentalnie (zależnie do posiadanego egzemplarza wentylatora) tak, aby odświeżanie obrazu było dostatecznie szybkie, a drgania spowodowane niewyważeniem wirnika miały rozsądną amplitudę. Proponowana wartość rezystora R2 to około 51 Ω.
Przyciski S1 i S2 służą do ustawienia czasu wyświetlanej przez zegar. Ustawianie odbywa się poprzez modulację amplitudową zasilania części wirującej zegara. Za kluczowanie generatora zasilacza wirnika (IC2) jest odpowiedzialny tranzystor T4 sterowany z multiwibratora monostabilnego IC3. Wciśnięcie przycisku S1 lub S2 powoduje podłączenie do wejścia wyzwalającego układu IC3 przebiegu prostokątnego pochodzącego z multiwibratora astabilnego IC4C, R4, C10 (IC4D, R8, C13), podawanego za pośrednictwem R6 (lub R9) i C9.
W efekcie na wyjściu układu IC3 pojawia się przebieg prostokątny o czasie trwania poziomu wysokiego około 1 ms (czas trwania impulsu ustalają elementy P2, C12) i częstotliwości zależnej od tego, który przycisk został przyciśnięty. Jeśli częstotliwość ustawiania (wolne lub szybkie) nam nie odpowiada, można ją zmieniać w dosyć szerokich granicach korygując wartości rezystorów R4, R8 (odpowiednio tryb wolny i szybki). Jako kondensatory C10 i C13 najlepiej zastosować kondensatory tantalowe. Zapewni to długoczasową stabilność częstotliwości multiwibratorów.
Na schemacie można znaleźć jeszcze stabilizator IC1 służący do zasilania układów IC3 i IC4. Dodatkowo generuje on napięcie referencyjne wykorzystywane przez źródło prądowe.
Do zasilania zegara najlepiej użyć zasilacza wtyczkowego o stabilizowanym napięciu 12 V i wydajności prądowej co najmniej 0,5 A. Nie polecam zasilania zegara napięciem wyższym niż wspomniane 12 V, ze względu na szybko zwiększające się straty w rdzeniu stojana i stabilizatorze napięcia umieszczonym na wirniku.
Wskazówka
Płytkę wirujcą zaprojektowano jako niewielką płytkę dwustronną, obrysem przypominającą wskazówkę. Zamontowano na niej układ właściwego zegara (rysunek 2), którego zasadniczymi elementami są mikrokontroler IC1 i układ RTC – IC2. W roli zegara czasu rzeczywistego zastosowałem PCF8563 (mniej popularna wersja układu PC8583, bez wewnętrznego RAM-u, za to w mniejszej obudowie). Ze względu na możliwość prawidłowej pracy już od napięcia 1,1 V, możliwe było zastosowanie do podtrzymania rejestrów RTC małej baterii zegarkowej o napięciu znamionowym 1,5 V. Układ z diodami D3, D4 decyduje, z którego źródła w danej chwili jest zasilany RTC. Należy zaznaczyć, że dioda D4 powinna być diodą o jak najniższym spadku napięcia (germanowa lub Shottky’ego). W miejsce diody D3 stosujemy typową diodę LL4148.
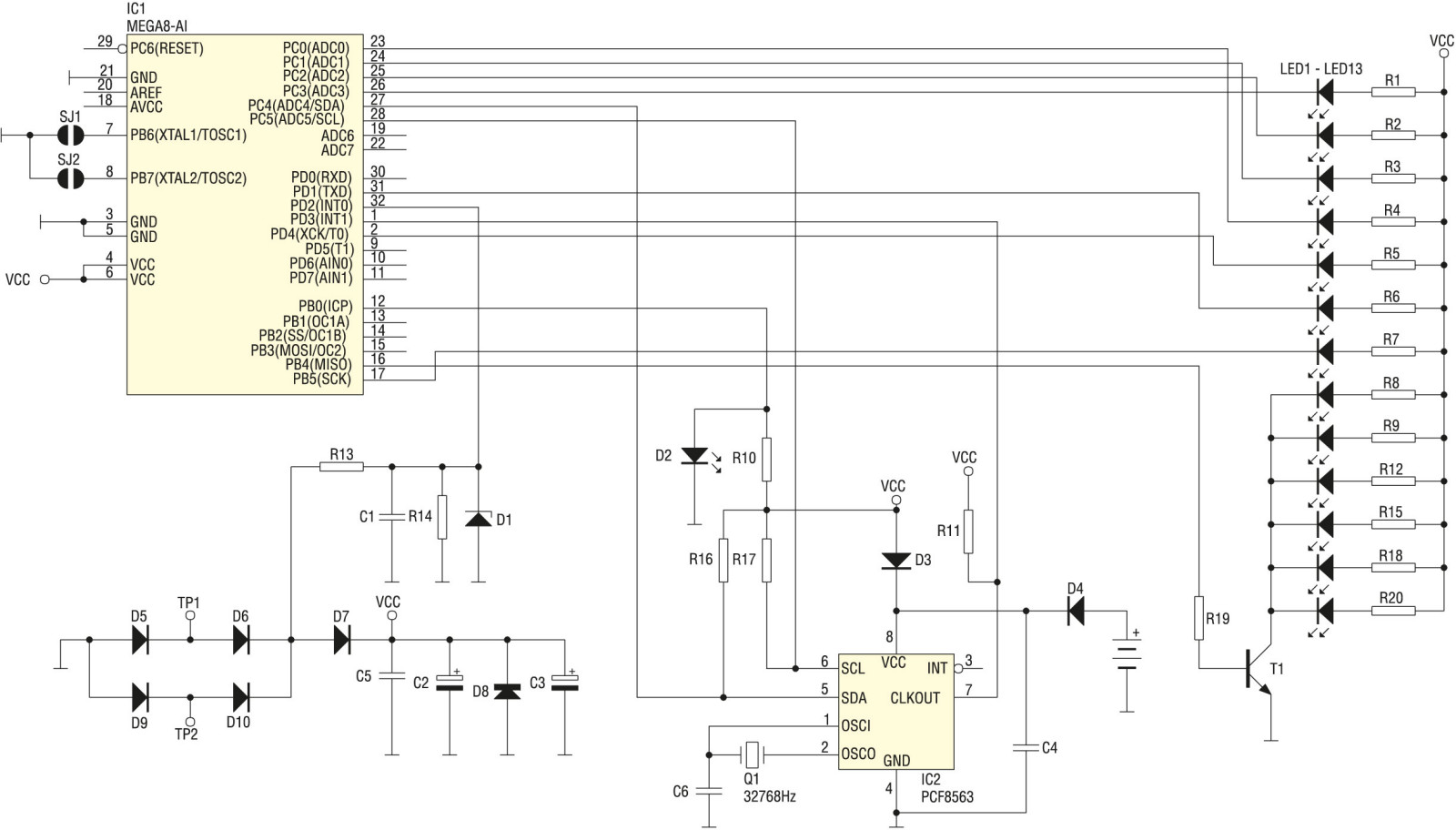
Za zasilanie wskazówki podczas pracy odpowiedzialne są elementy D5-D10, C2, C3, C5. Diody D5, D6, D9, D10 tworzą typowy prostownik dwupołówkowy, odseparowany za pomocą diody D7 od filtru zasilacza, w skład którego wchodzą kondensatory C2, C3, C5. Dioda D8 pracuje w roli parametrycznego stabilizatora napięcia. Ponieważ ustawianie zegara odbywa się poprzez modulacje amplitudową sygnału zasilania zegara, zanim sygnał ten zostanie odfiltrowany trzeba z niego wydobyć impulsy odpowiedzialne za ustawienie zegara.
W tym celu dodano układ demodulatora złożony z elementów R13, C1, R14, D1.
Jest to prosty filtr dolnoprzepustowy o tak dobranej stałej czasowej, aby na jego wyjściu otrzymać zdemodulowany sygnał ustawiania zegara (ujemne impulsy o czasie trwania około 1 ms). Dioda D1 ogranicza wartość uzyskanego po demodulacji napięcia do akceptowalnej przez mikrokontroler. Zbocze sygnału ustawiania zegara doprowadzonego do wejścia INT0 powoduje wywołanie przerwania zewnętrznego. Po tym zdarzeniu mikrokontroler z użyciem Timera0 mierzy czas trwania poziomu niskiego na doprowadzeniu INT0 i stwierdza czy odebrany impuls pochodził od układu ustawiania godziny, czy też był przypadkowym zanikiem zasilania. Jeżeli impuls mieścił się w zdefiniowanych w programie ramach czasowych, czas pokazywany przez zegar jest zwiększana o jedną minutę, a sekundy przyjmują wartość zero. Drugie przerwanie zewnętrzne (INT1) obsługuje zegar RTC i zgłaszane jest w momencie odliczenia przez układ IC2 każdej kolejnej sekundy.
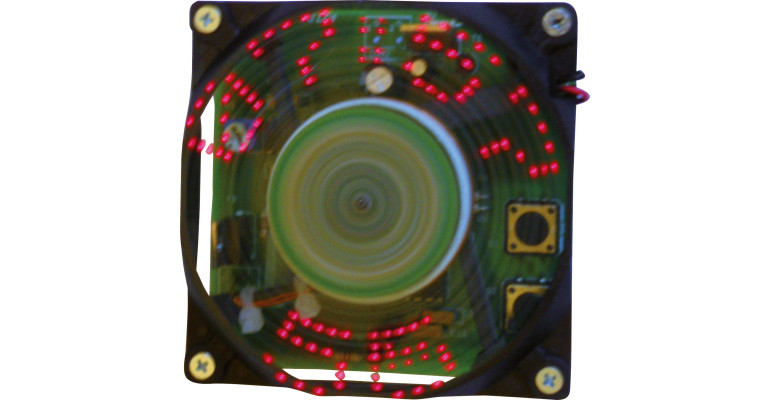
Wyświetlacz jest zbudowany z linijki diod LED, które rozmieszczone są w taki sposób, aby można było wyświetlać zarówno czas w trybie analogowym (zegar wskazówkowy), jak i cyfrowym (czas za pomocą cyfr). Szeregowe oporniki ograniczają prąd szczytowy każdej z diod. Mała wartość ich rezystancji jest spowodowana bardzo krótkim czasem świecenia diod.
Należy jeszcze wspomnieć o układzie synchronizacji wskazówki zegara, w skład którego wchodzą fotodioda D2 oraz dioda nadawcza podczerwieni umieszczona na płytce zasilacza (IRED1). Każdy obrót wskazówki zegara powoduje krótkotrwałe oświetlenie diody odbiorczej wirnika i pojawienie się zbocza opadającego na wejściu ICP mikrokontrolera, co z kolei powoduje przechwycenie wartości rejestrów Timera1 mierzącego czas obrotu. Uzyskany w ten sposób czas służy do wyznaczenia podziałki zegara.
Konstrukcja mechaniczna
Część nieruchomą zegara widmowego wykonano ze stojana wentylatora komputerowego, do którego jest przymocowana płytka zasilacza zegara. Częścią ruchomą jest wirnik wentylatora, pozbawiony łopatek, z zamocowaną płytką wyświetlacza.
Wentylator wymaga demontażu. Rozbiera się go stosunkowo łatwo. W pierwszej kolejności zdejmujemy nalepkę naklejoną od spodniej strony, pod którą znajduje się przeważnie gumowa zaślepka którą należy wyciągnąć. Pod zaślepką widać kawałek osi wirnika i plastikową zawleczkę zapobiegającą wysunięciu się wirnika ze stojana. Zawleczkę można łatwo usunąć za pomocą zakrzywionej pincety. Po jej usunięciu wirnik można swobodnie wysunąć i poobcinać łopatki. Pozostałości usuwamy za pomocą pilnika i papieru ściernego.
Kolejny czynnością, którą należy wykonać jest nawinięcie uzwojeń transformatora bezrdzeniowego (pierwotne na stojanie, wtórne na wirniku). Karkas uzwojenia pierwotnego wykonujemy z kawałka rurki PCV o średnicy 40 mm i wysokości 10 mm. Następnie rurkę przyklejamy do stojana w taki sposób, aby wirnik włożony w stojan swobodnie się w niej obracał. Rurkę przyklejamy punktowo za pomocą kleju cyjanoakrylowego do żeber stojana. Na karkasie nawijamy uzwojenie składające się z 10 zwojów drutu emaliowanego o średnicy 0,4 mm. Zwoje kładziemy w jednej warstwie, a nawijanie zaczynamy od dolnej krawędzi karkasu. Po nawinięciu końce uzwojenia prowadzimy po odpowiednim żeberku stojana, tak aby trafiały w odpowiednie miejsce na płytce zasilacza. Uzwojenie zabezpieczamy przed rozwinięciem warstwą lakieru.
Uzwojenie wtórne nawijamy drutem emaliowanym o średnicy 0,2 mm bezpośrednio na wirniku w miejscu, gdzie były łopatki, zaczynając nawijanie podobnie (jak w przypadku stojana), od krawędzi dolnej. Zwój przy zwoju owijamy wirnik 20 razy a uzwojenie zabezpieczamy lakierem. Kierunek nawijania uzwojeń nie ma znaczenia.