- wyświetlanie liczby zarejestrowanych impulsów,
- maksymalna pojemność licznika: 9999,
- wbudowany rezystor podciągający do obsługi elementów stykowych,
- możliwość wyboru reakcji na zbocze opadające i/lub narastające,
- obsługa przepełnienia licznika: sygnalizacja lub zerowanie,
- maksymalna częstotliwość impulsów: 10 Hz,
- czytelny, czterocyfrowy wyświetlacz siedmiosegmentowy LED,
- możliwość ręcznego wyzerowania wskazań,
- pobór prądu 30…70 mA,
- zasilanie napięciem stałym 9…18 V.
Liczenie kolejnych zwojów nawiniętych na karkas transformatora czy obrotów wału podnośnika – po co robić to ręcznie? Można się rozproszyć, pomylić, zapomnieć i... cały wysiłek na marne. Po to mamy elektronikę, aby oddawać jej tak mozolne i nudne czynności, jak zwykłe liczenie kolejno powtarzających się czynności.
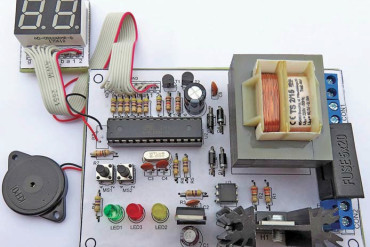
Opisywany układ jest prosty pod tym względem, że nie ma wielu rozbudowanych funkcji, które mogą zwykłego „zjadacza kajzerek” przyprawić o zawrót głowy. Wyświetlacz, wejście zerowania i przycisk, wejście impulsów, wejście zasilania. Dodałem też trzy zworki z tyłu, które przestawia się lutownicą, a które diametralnie rozszerzają możliwości tego układu. Dwie dotyczą wyboru zbocza, na którym następuje reakcja, a trzecia umożliwia pracę licznika w pętli lub sygnalizację jego przepełnienia. Proste, łatwe i – co najważniejsze – skuteczne.
Budowa
Sercem urządzenia jest mikrokontroler typu ATmega8A z 8-bitowym rdzeniem AVR taktowanym sygnałem o częstotliwości 8 MHz, którego wzorcem jest wbudowany oscylator RC. Nie ma potrzeby stabilizacji częstotliwości sygnału zegarowego np. rezonatorem kwarcowym, ponieważ układ nie robi nic, co byłoby istotne z punktu widzenia dokładności w dziedzinie czasu. Użytkownik ma do dyspozycji trzy zworki SMD, które służą do wyboru sposobu zliczania impulsów i obsługi przepełnienia. Wbudowane w mikrokontroler rezystory podciągające zapewniają wysoki stan logiczny po rozwarciu tychże zworek.
Użyty wyświetlacz ma cztery cyfry, z których każda jest złożona z siedmiu segmentów oraz kropki. Do jego pełnego wysterowania w trybie multipeksowym potrzeba zatem dwunastu wyprowadzeń mikrokontrolera, których ten ma aż nadto. Dzięki nadmiarowym liniom GPIO można było pominąć dodatkowe układy rozszerzające liczbę wyjść, które zwiększałyby ilość miejsca zajmowanego przez układ na powierzchni laminatu. Prąd pojedynczego segmentu wynosi około 10 mA, co zapewnia wysoką jasność świecenia wyświetlacza i jego dobrą czytelność nawet w niekorzystnych warunkach (zabrudzenie szybki obudowy, refleksy, silne oświetlenie itp.). Segmenty są sterowane bezpośrednio z wyprowadzeń mikrokontrolera, lecz całe cyfry muszą być obsługiwane przez klucze tranzystorowe T1…T4, ponieważ ich sumaryczny prąd może sięgać 80 mA, co jest wartością zbyt wysoką dla pojedynczego wyprowadzenia układu z serii ATmega.
Zaprogramowanie pamięci Flash montowanego powierzchniowo mikrokontrolera ułatwia złącze J2, do którego zostały doprowadzone linie sygnałowe służące do programowania w systemie. Linie te zostały dodatkowo podciągnięte
do dodatniego potencjału zasilającego przez zewnętrzne rezystory o wartości 10 kΩ, aby układ był bardziej odporny za pochodzące z zewnątrz zakłócenia elektromagnetyczne, których w środowisku przemysłowym jest przecież niemało.
Mikrokontroler zasilany jest stabilizowanym napięciem 5 V ze stabilizatora US2. Pobór prądu jest na tyle niski, że prosty układ scalony w obudowie TO220 poradzi sobie z odprowadzeniem ciepła nawet przy wysokiej różnicy napięć między wejściem a wyjściem. Jeżeli układ nie będzie wciśnięty w wyjątkowo ciasną obudowę z niebywale słabą wentylacją, to stabilizator będzie mógł się obyć bez radiatora. Dioda D1 zabezpiecza układ przed uszkodzeniem w razie pomyłki przy wyborze polaryzacji przewodów zasilających.
Wejściem impulsów jest złącze J3. Ponieważ układ jest przystosowany do pracy z elementami stykowymi, jeden z zacisków tego złącza podciągnięto do zasilania 5 V przez rezystor o wartości 1,2 kΩ, co wymusza przepływ prądu o natężeniu około 4 mA przez nadzorowane styki. Filtr RC, składający się z rezystora R18 i kondensatora C7, ma stałą czasową wynoszącą 1 ms, zaś jego zadaniem jest usunięcie z zerojedynkowego sygnału (styki zwarte – stan niski, styki rozwarte – stan wysoki) niepożądanych impulsów wywołanych iskrzeniem tychże styków. Jest to także ochrona wejścia mikrokontrolera przed możliwymi przepięciami wywołanymi przez ładunki elektrostatyczne oraz zewnętrzne zakłócenia elektromagnetyczne. Stosunkowo niska wartość R17 powoduje, że układ nie jest czuły na zakłócenia zbierane przez długie przewody łączące płytkę z przyciskiem.
Rezystor R19 stanowi dodatkową barierę dla potencjalnie podwyższonego napięcia odłożonego na kondensatorze C7, ponieważ ogranicza prąd wewnętrznych diod zabezpieczających wejście mikrokontrolera. Gdyby ten układ miał zliczać szybkie impulsy, wówczas zasadne byłoby pytanie o sens dodawania kolejnego członu opóźniającego (rezystancja R19 i pojemność wejścia mikrokontrolera), lecz opisywana konstrukcja od początku była projektowana do rejestrowania impulsów występujących kilka razy w ciągu sekundy, więc – jak na elektronikę – bardzo rzadko. Zewnętrzne wejście zerujące (złącze J4) zostało opatrzone podobnym zabezpieczeniem, z tą różnicą, że nie ma filtrującego członu RC, ponieważ iskrzenie styków przycisku zerującego nie zrobi tutaj nikomu różnicy. Licznik zeruje się po wykryciu jakiegokolwiek stanu niskiego na tym wejściu.