
Jak to działa?
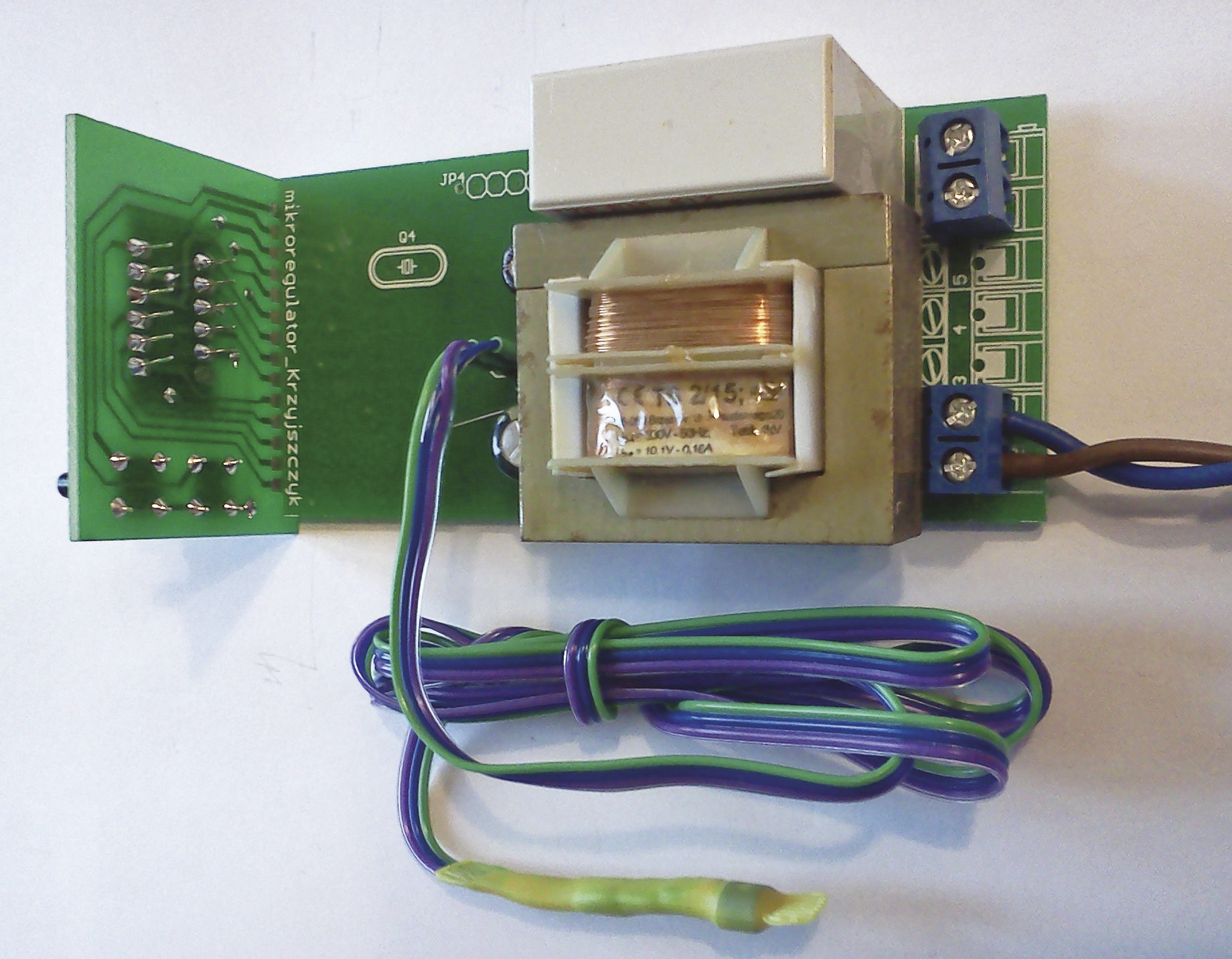
Schemat mikroregulatora widzimy na rysunku 1. Sercem jest oczywiście ATmega8 w obudowie SMD (TQFP). Elementy TS2/14, B1, C7, C5, 7805, C4, C6 tworzą najzwyklejszy zasilacz dostarczający układowi napięcia 5V. Jeśli skorzystamy z innego źródła zasilania (nie sieciowego), np. z dowolnego zasilacza 9V, wtedy nie musimy montować trafka TS2/14 i regulator naprawdę nabiera rozmiarów mikro.
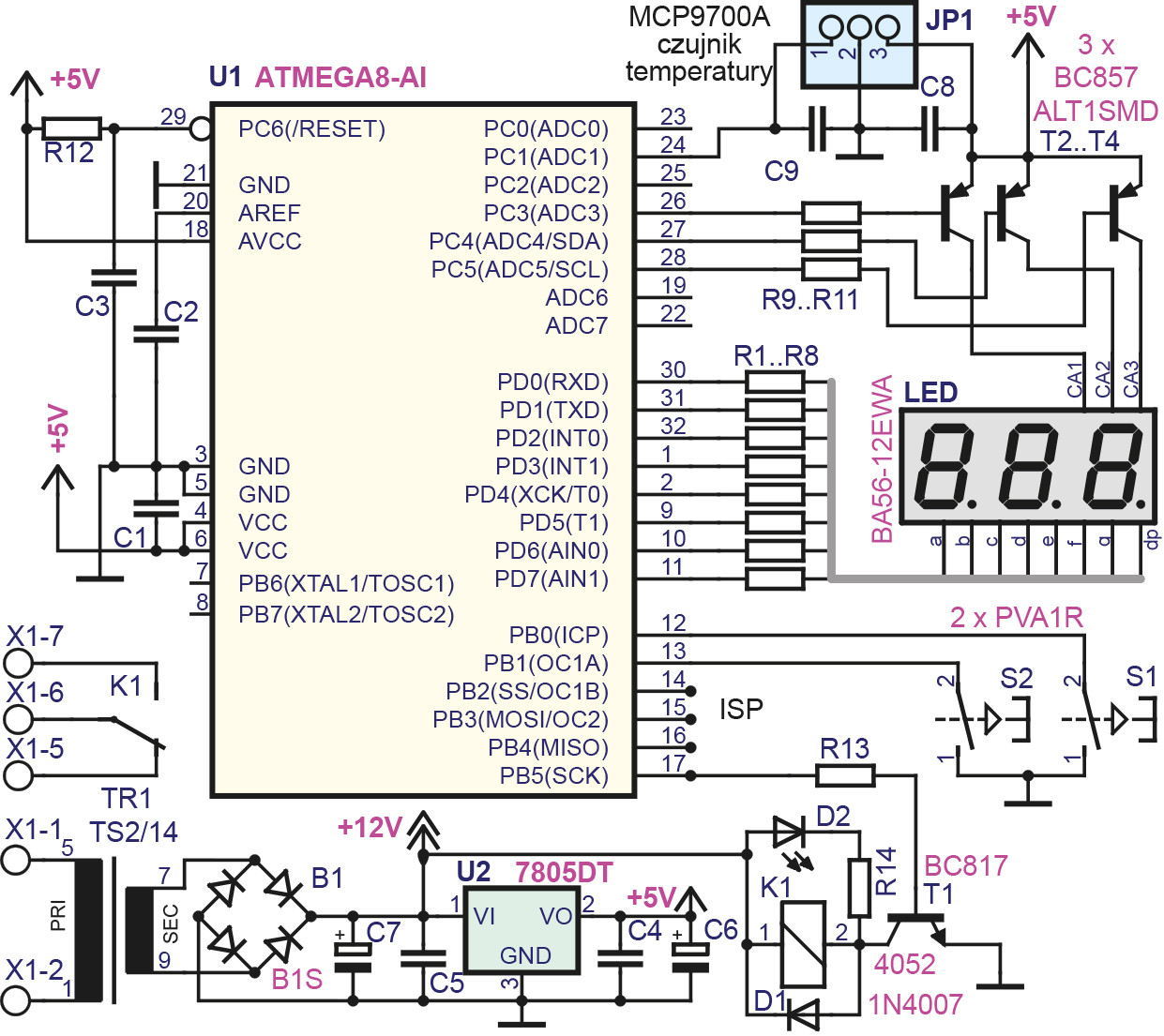
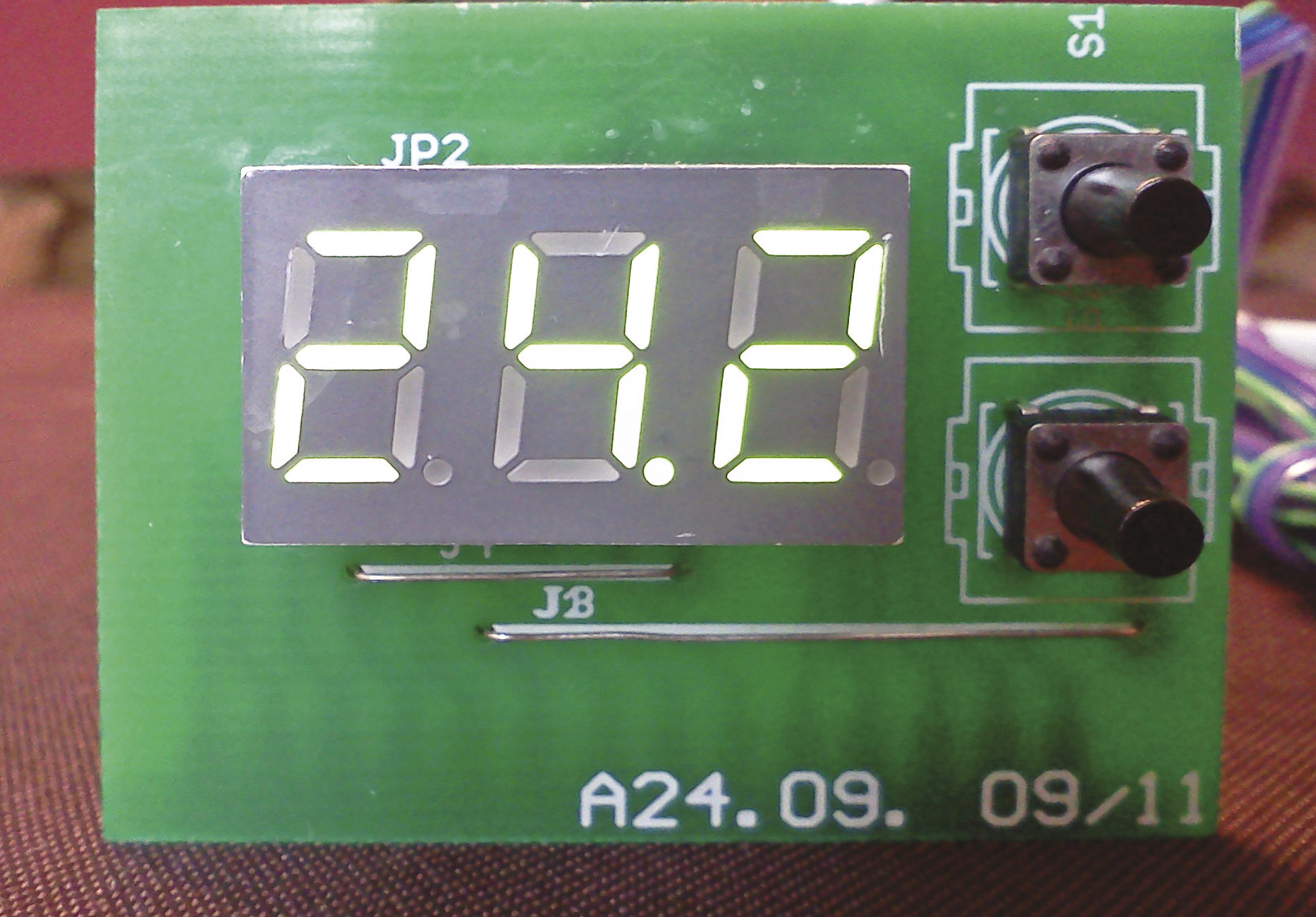
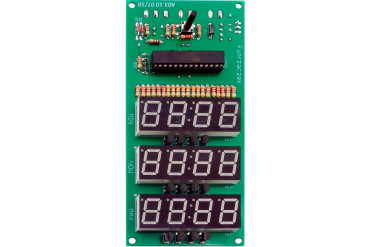
Cały port D ATmegi steruje katodami wyświetlacza. Tranzystory Q1–Q3 sterują w odpowiednich momentach anodami tych wyświetlaczy.
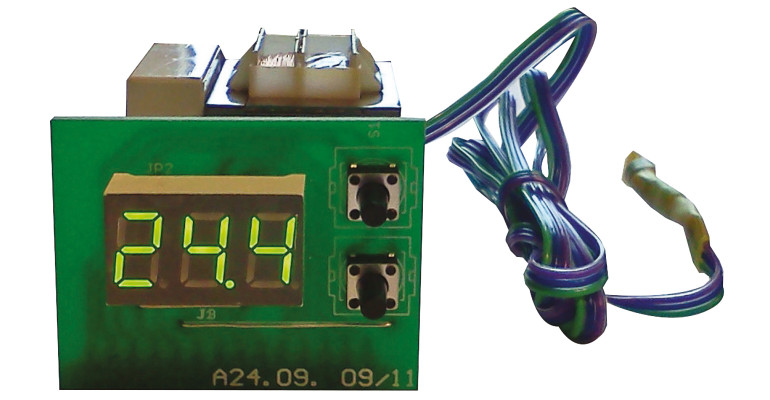
Do pomiaru temperatury zastosowałem wdzięczny czujnik – „cyfrowy termistor” MCP9700A, dający na wyjściu napięcie proporcjonalne do temperatury z offsetem 500mV. Dla temperatury 0°C daje 500mV, dla 25°C daje 750mV. Procesor ATmega8 odczytuje napięcie z czujnika temperatury podane na wejście ADC1 przetwornika ADC, dokonuje obliczeń (zwiększenie rozdzielczości, odjęcie offsetu) i przygotowuje dane do wystawienia na port D, aby zaświecić LED-y na wyświetlaczu.
W aktualnej wersji oprogramowania napisanego w Bascomie histereza jest stała i wynosi ±0,1°C.
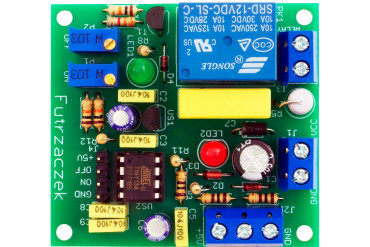
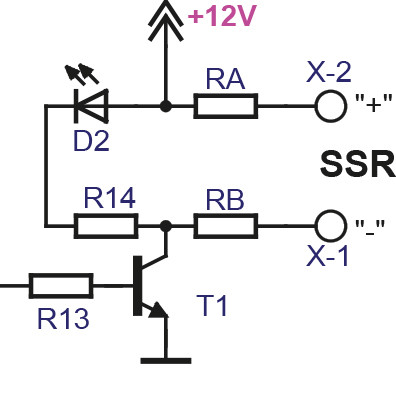
Sterowanie obciążeniem zrealizowane jest przez elementy R13, T1, K1. W podstawowej wersji wykorzystałem klasyczny przekaźnik. Warto jednak zamiast niego zastosować przekaźnik elektroniczny – SSR według rysunku 2.
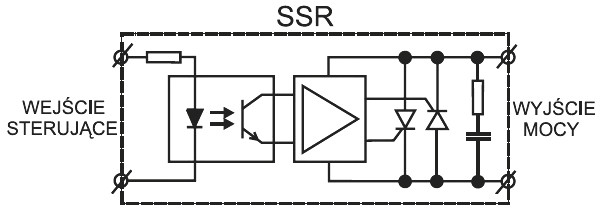
SSR – (ang. Solid State Relay) to zespolony przekaźnik elektroniczny. Przykład na fotografii 1.

Schemat blokowy przekaźnika półprzewodnikowego widać na rysunku 3.
Zalety SSR:
- duża trwałość i niezawodność działania, wielomilionowe załączenia,
- brak łuku na stykach jak w klasycznych stycznikach pozwala przełączać duże moce,
- odporność na agresywne środowisko, kurz, wibracje,
- nie wywołują zakłóceń elektromagnetycznych związanych z drganiem styków jak w mechanicznych przekaźnikach,
- łatwość sterowania, wprost z układów logicznych, mikroprocesorowych,
- szybkie w działaniu, czas załączenia < 1ms.
Wady SSR:
- spadek napięcia na złączu (1...1,6V), wydzielanie się ciepła, konieczność stosowania radiatora,
- określona rezystancja złącza, wrażliwość na przepięcia – konieczność stosowania gasików RC lub warystora,
- prąd upływu, nie zapewnia przerwy galwanicznej obciążenia.
Ogólnie biorąc, SSR-y mają istotne zalety. Dzięki swej kompaktowej budowie łatwo je montować, obudowa jest z tworzyw, ma dwa otwory montażowe. Są ciche i odporne na kurz, warunki środowiskowe, ponieważ cały obwód wewnątrz jest zalany żywicą. Najważniejszą zaletą jest brak mechanicznych styków, które się z czasem wypalają. Do tego minimalne wymagania co do budowy i instalacji. Przekaźnik SSR można przykręcić do radiatora albo do chłodnej metalowej części obudowy, do której zamontujemy nasz mikroregulator. Sterowanie to dwa kabelki z napięciem z zakresu przeważnie 3...30V i prąd do 20mA – w naszym przypadku sygnał z miejsca, gdzie właczona ma być cewka przekaźnika. Warto zamontować rezystorki RA, RB o wartości 10...30Ω będą one chronić tranzystor przed uszkodzeniem na wypadek zwarcia wejścia SSR-a. Wyjście SSR-a włączamy szeregowo z obciążeniem.
Montaż i uruchomienie
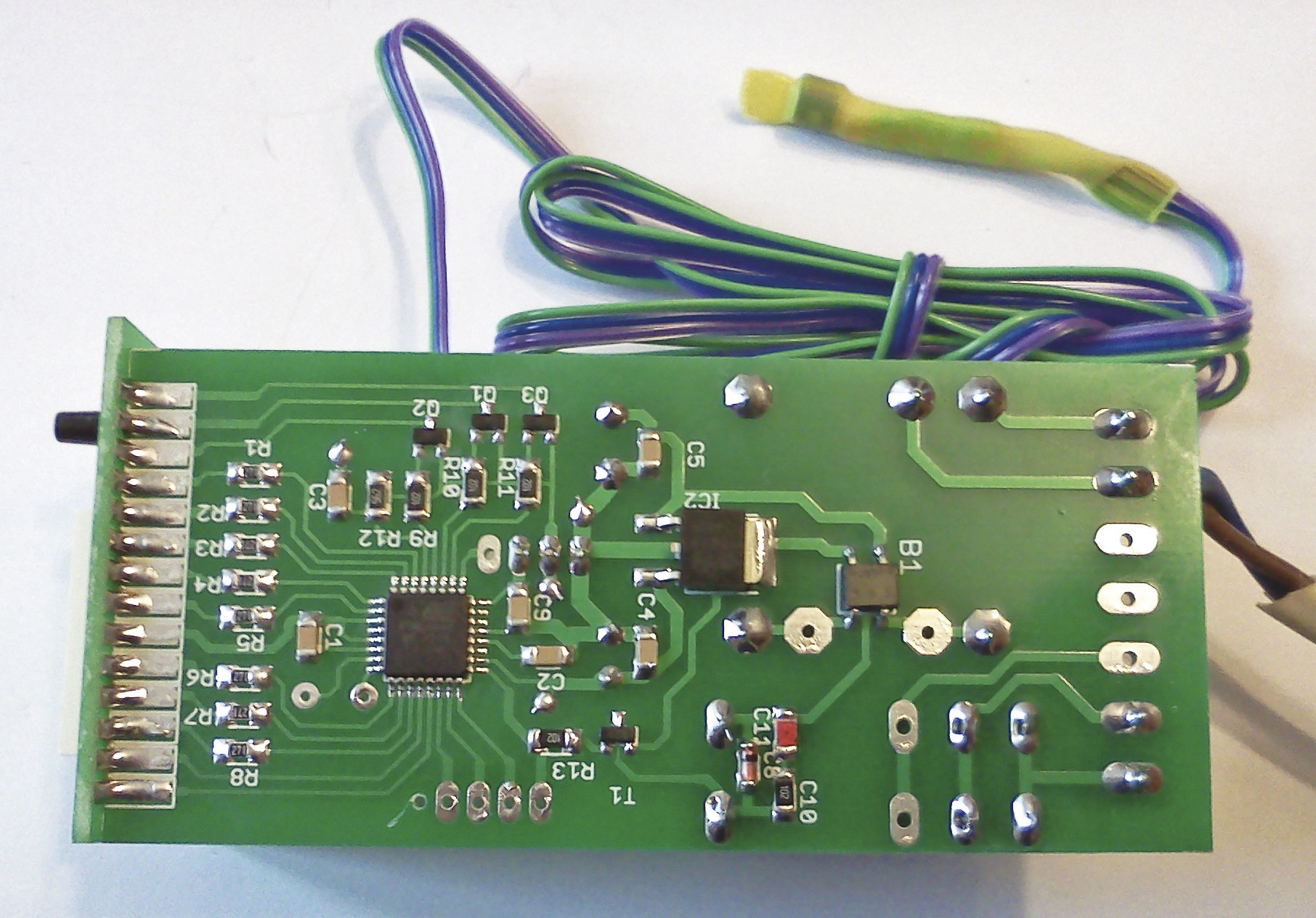
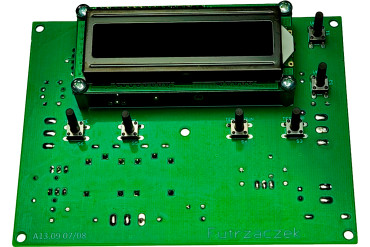
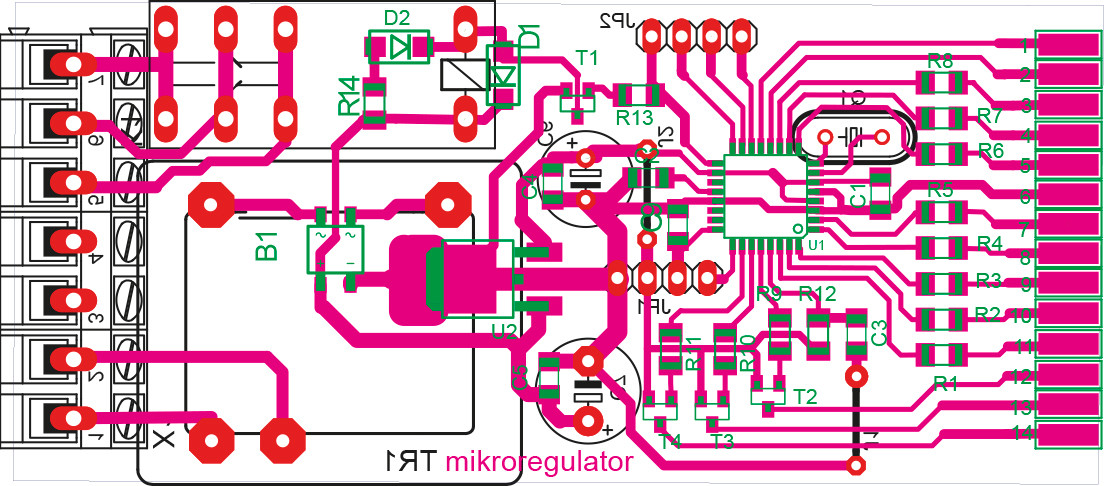
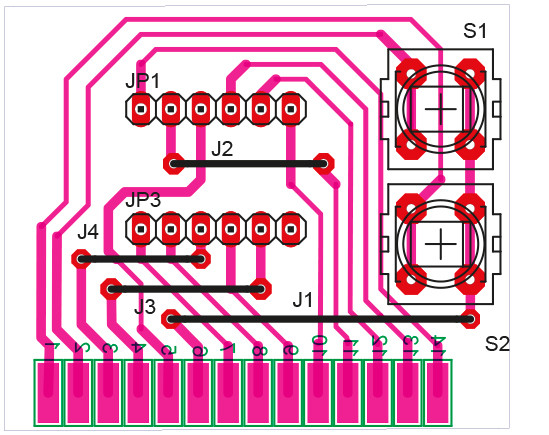
Montaż na płytce pokazanej na rysunkach 4 i 5 jest typowy. Ale uwaga – rysunek 4 przedstawia nietypowo widok płytki od strony lutowania. Pomocą w montażu będą fotografie modelu. Zaczynamy od najmniejszych elementów, kończymy na największych. Układ nie wymaga ani uruchomiania ani kalibracji – działa poprawnie po zmontowaniu i zaprogramowaniu ATmegi. Program i dokumentacja płytki oraz fotografie są dostępne w Elportalu wśród materiałów dodatkowych do tego numeru EdW.
Opisany mikroregulator nie musi wcale być regulatorem temperatury. Można zamiast czujnika temperatury podłączyć potencjometr, do jego osi ramię z pływakiem i mamy gotowy cyfrowy wskaźnik poziomu cieczy. Pozostaje tylko zmienić obliczenia w programie aby dopasować wartości wyświetlane do mierzonych.