




Steronik silnika krokowego - właściwości
- płynna regulacja prędkości obrotowej i kierunku obrotów (tym samym potencjometrem)
- regulacja prędkości obrotowej podzielona na dwa zakresy (1 ÷ 10 i 7 ÷ 100 cykli na sekundę)
- sterowanie mikrokrokowe o rozdzielczości 1/64 lub 1/8 kroku
- odpowiedni do silników bipolarnych (4 przewody) i
- funkcja pracy czasowej, czas płynnie regulowany wunipolarnych (5 lub 6 przewodów) zakresie 0.5 ÷ 70s
- zakres napięcia zasilającego (napięcia znamionowego silnika) 8 ÷ 25V
- prąd wyjściowy do 2A na kanał (cewkę)
Sterownik silnika krokowego - opis układu
Zakres zmian prędkości wirowania osi silnika podzielono na dwa podzakresy 1...10 lub 7...100 cykli na sekundę. Wyboru można dokonać odpowiednią zworką. Sterowanie mikrokrokowe odbywa się z rozdzielczością 1/64 lub 1/8 kroku. Praca z mikrokrokiem polega na obracaniu polem magnetycznym stojana w sposób zancznie bardziej płynny niż w sterowaniu pełno- i pół-krokowym. Dzięki pracy z mikrokrokiem możliwe jest uzyskanie mniejszych kroków i dokładniejszego pozycjonowania.
Kiedy silnik sterowany jest przy niskich częstotliwościach z pełnym krokiem lub półkrokiem ruch staje się nieciągły i charakteryzuje się dużym poziomem zakłóceń i drgań. Przy małym kroku energia przekazana rotorowi przy jednym kroku wynosi tylko ułamek energii pełnego kroku i jest tak mała, że może być z łatwością pochłonięta i zamortyzowana przez wewnętrzne tarcie w silniku i jego bezwładność. Nie powstają wtedy żadne drgania, a wirnik silnika nie wybiega w żadnej chwili poza swoje pożądane położenie. Sterowanie mikrokrokowe umożliwia również dużo cichszą pracę silnika.
Opisywany sterownik należy zasilać napięciem z przedziału 8...24V DC, a maksymalny prąd wyjściowy wynosi do 2 A/kanał (cewkę) z odpowiednim radiatorem. Bez niego sterownika bezpiecznie można używać z prądem do 250mA na kanał/cewkę. Dodatkowo sterownik wyposażono w funkcję pracy czasowej (czas jest regulowany płynnie w zakresie 0,5...70s). Zworka START/STOP konfiguruje sterownik na pracę ciągłą lub czasową.
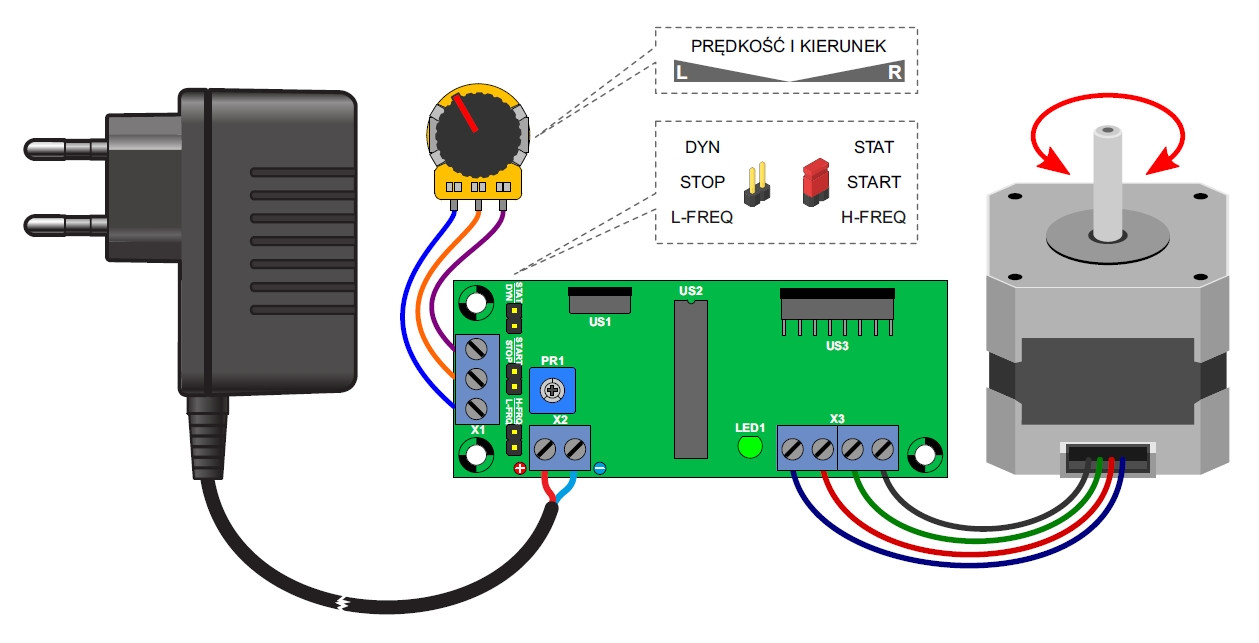
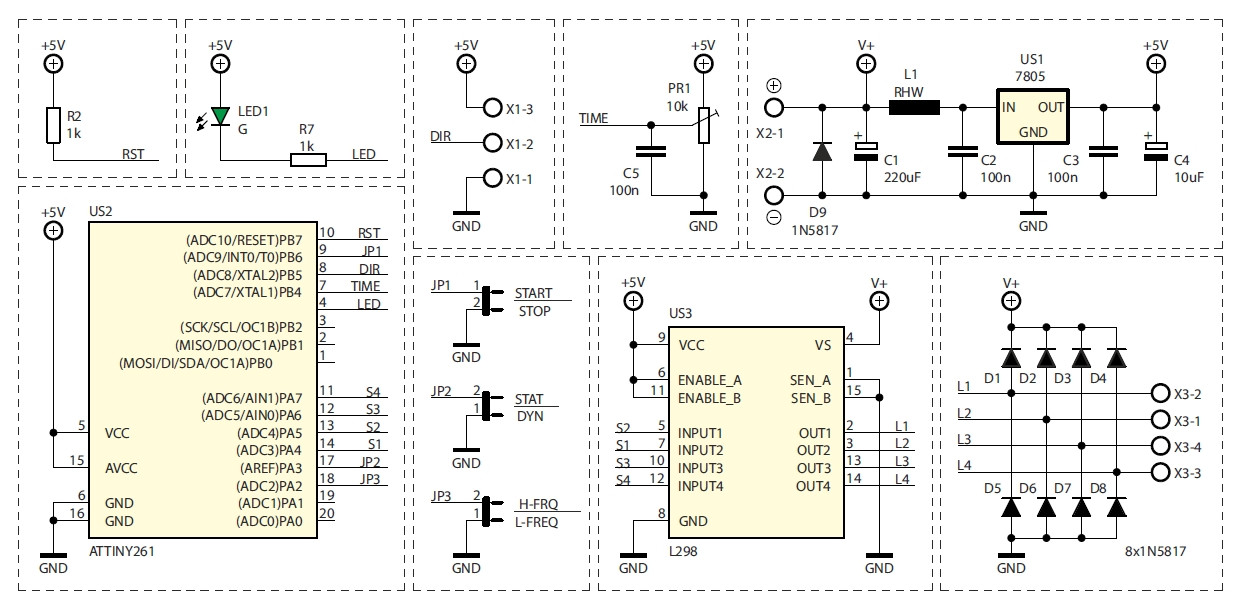
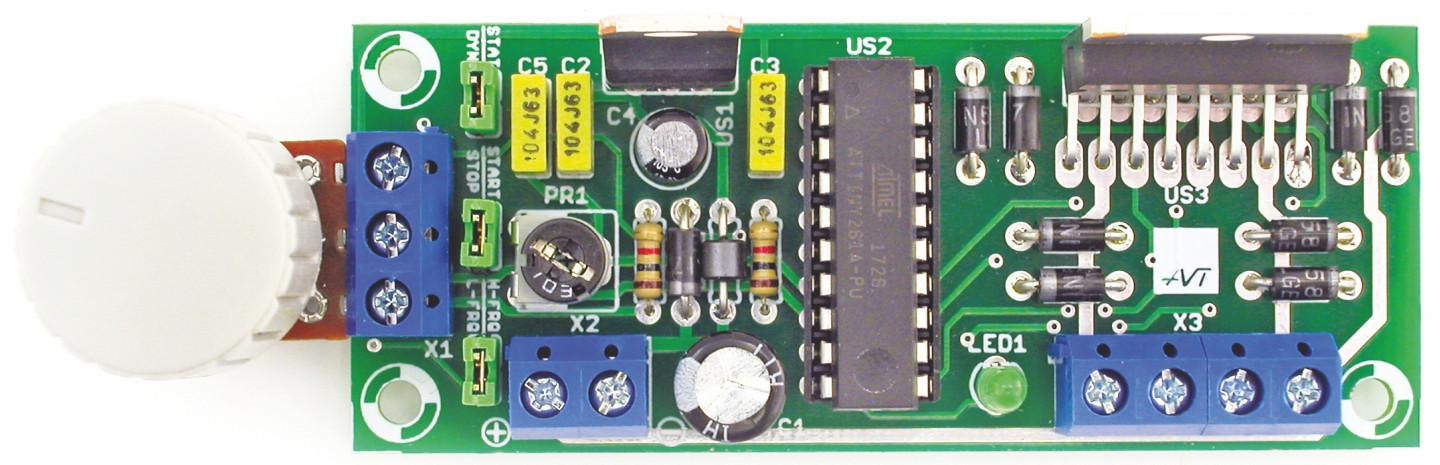
Czas ustawiany jest potencjometrem, a wyzwolenie odliczania czasu następuję po krótkotrwałym zwarciu szpilek zworki START/STOP. Rysunek 1 przedstawia konfigurację sterownika wraz z najważniejszymi elementami jego budowy. Schemat ideowy sterownika pokazano na rysunku 2. Właściwego zasilania dostarcza stabilizator 7805 wraz z pojemnościami C1...C4. Stopień mocy zrealizowano na dobrze znanym układzie scalonym L298, który zawiera w sobie dwa mostki H.
Jego pracą steruje mikrokontroler ATtiny261, a dokładnie program zawarty w jego pamięci. Sterowanie mikrokrokowe uzyskiwane jest poprzez sterowanie uzwojeniami silnika przebiegiem PWM. Charakterystyka modulacji PWM ma kształt przebiegu trójkątnego. Takie rozwiązanie jest nieskomplikowane i skuteczne w większości przypadków pracy silnika.
Na płytce sterownika znajdują się zworki, które służą do konfigurowania układu. Zworka opisana jako HFRQ/ L-FRQ służy do zmiany podzakresu prędkości. Jeżeli jest zamontowana, to wybrana zostanie wyższa częstotliwość sekwencji, ok. 7...100 cykli na sekundę (czyli pełnych okresów przebiegu w każdym kanale). Układ pracuje z niższą rozdzielczością 1/8 kroku. Brak zworki oznacza niższą częstotliwość sekwencji, czyli ok. 1...10 cykli na sekund oraz wyższą rozdzielczość mikrokroków 1/64. Zworka STAT/DYN określa, czy silnik w czasie zatrzymania będzie miał odłączone zasilanie – zatrzymanie statyczne (zworka założona), czy zasilanie będzie utrzymane – zatrzymanie dynamiczne (zworka zdjęta).
Przy zatrzymaniu statycznym jest możliwy prawie swobodny ruch wału silnika, w czasie zatrzymania dynamicznego wał silnika jest zablokowany w swym położeniu, i tu należy pamiętać, że przez cewki płynie prąd przez co silnik będzie się nagrzewał. Sterownik posiada funkcję pracy czasowej. Jej załączenie następuje po zwarciu złącza START/STOP i trwa przez czas proporcjonalny do położenia potencjometru PR1.
Czas liczony jest od momentu zdjęcia zworki START/STOP. Najlepiej zworkę zastąpić przyciskiem monostabilnym zwiernym typu reset. Jeżeli zwora pozostanie założona, sterownik będzie pracował przez cały czas. Potencjometr dołączony do złącza śrubowego X1 służy do regulacji kierunku i prędkości obrotowej – w środkowym położeniu silnik jest zatrzymany, obracanie potencjometru powoduje stopniowe zwiększanie prędkości obrotowej. Zamiast tego potencjometru można dołączyć joystick potencjometryczny, wtedy obroty silnika będą proporcjonalne do kierunku i kąta wychylenia joysticka.
Sterownik silnika krokowego - montaż i uruchamianie
Wzór obwodu drukowanego przedstawiony jest na rysunku 3. Wymiary płytki sterownika to 33×83 mm. Układ zbudowany jest w oparciu o elementy do montażu przewlekanego, dzięki czemu z tą czynnością poradzą sobie nawet mniej doświadczeni hobbyści. Prawidłowo zmontowany układ działa od razu po dołączeniu napięcia zasilającego.
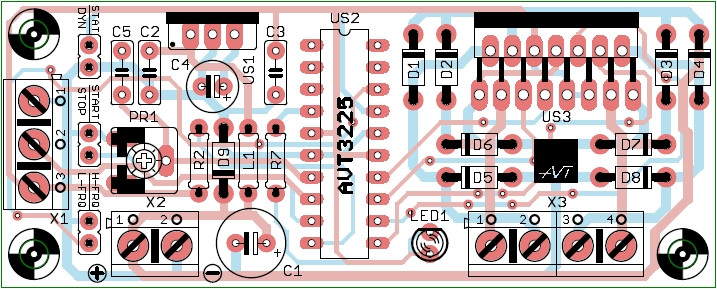
Jeżeli silnik będzie pobierał prąd powyżej 250mA na kanał, układ L298 wymaga zastosowania dodatkowego radiatora. Na odkryte, czyli bez soldermaski ścieżki warto dodatkowo nalutować srebrzankę o średnicy 0,8-1 mm aby dodatkowo poprawić obciążalność prądową ścieżek. Dotyczy to przypadków gdy prąd jednej cewki/kanału będzie przekraczał 500mA.
Układu powstał z myślą o sterowaniu napędem wózka do kamery. Doskonale nadaje się do uzyskiwania bardzo niskich prędkości obrotowych silnika krokowego. Należy jednak pamiętać, że pomimo wysokiej rozdzielczości sterowania mikrokrokowego, w niektórych silnikach ruch wału może nie być idealnie płynny i mogą występować niewielkie drgania. W związku z tym najlepiej wybierać silniki o dużej liczbie kroków na obrót np. 200 (1.8°) lub 400 (0.9°).



















