



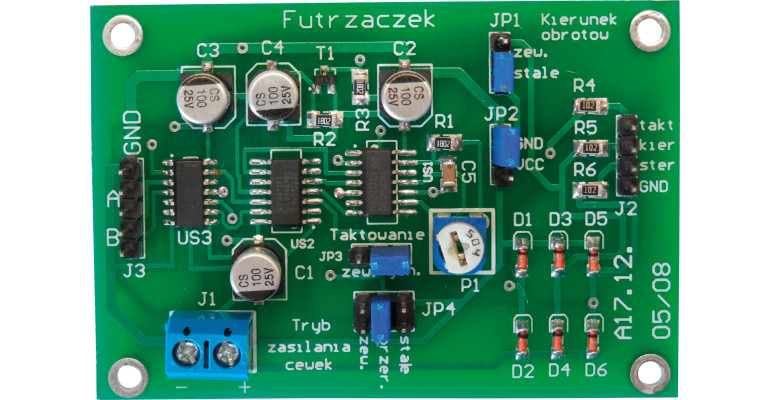

- Płytka drukowana o wymiarach 7,5 cm×5 cm.
- Zasilanie zależne od zastosowanych układów CMOS, typowo 5…12 V DC.
- Możliwość sterowania silnikiem za pomocą sygnałów wewnętrznych lub zewnętrznych.
- Brak wbudowanego mostka H.
- Nieskomplikowana konstrukcja jedynie w oparciu o elementy dyskretne, nieprogramowalne.
Silniki krokowe są coraz chętniej stosowanymi podzespołami. Ich pierwszorzędne zalety to możliwość uzyskiwania dowolnie małych prędkości obrotowych wału oraz precyzja ustawiania jego położenia. Istotną wadą jest skomplikowane zasilanie ich cewek. Częściej wykorzystywane są silniki tzw. bipolarne, ponieważ pozwalają na zwiększenie uzyskiwanego momentu obrotowego o ok. 30…40% w stosunku do silników unipolarnych o tych samych gabarytach, które są za to prostsze w sterowaniu.
Prezentowane urządzenie realizuje podstawową funkcję kontrolera, jaką jest odpowiednie sterowanie wejściami układów wykonawczych. Tymi układami są mostki H (lub układy spełniające podobną rolę), ponieważ w procesie komutacji konieczna jest okresowa zmiana polaryzacji cewek silnika (stąd nazwa: bipolarny).
Zasada działania
Analizując kierunki przepływu prądu w cewkach silnika można zauważyć, jakie są konieczne poziomy logiczne na wejściach mostków H, wymagane do prawidłowego zasilenia cewek bipolarnego silnika krokowego, a jednocześnie niepowodujące zbędnej komplikacji układu sterowania.
Wynika z niej, że potrzebne są dwa przebiegi prostokątne o tym samym okresie, ale przesunięte względem siebie o 90°. Do wykonania owego przesunięcia zostały zaprzęgnięte dwa przerzutniki typu D – łącznie, układ może się znaleźć w czterech możliwych stanach, zatem dwa jednobitowe elementy pamiętające są tutaj wystarczające. Po czterech okresach sygnału zegarowego, układ powraca do stanu wyjściowego i rozpoczyna pracę od nowa. Elementy kombinacyjne, okalające przerzutniki, mają na celu wprowadzenie dodatkowych funkcji: umożliwianie zmiany kierunku obrotów wirnika oraz jednoczesną dezaktywację wszystkich wyjść.
Jeżeli na jedno z wejść zostanie podane logiczne „0”, wówczas wyjście jest kopią stanu logicznego drugiego wejścia. W drugim przypadku, po podaniu na stałe logicznej „1”, wyjście jest negacją drugiego wejścia. Bramka ta zostanie wykorzystana jako „sterowany negator”, służący zmianie kierunku obrotów. Dokładniej rzecz ujmując, za jej pomocą zostaje zmieniony znak fazy określającej przesunięcie między dwoma sekwencjami sygnałów sterujących: z +90° na –90°.
Dodatkowo, wiedząc, iż rolą przerzutnika typu D jest powtarzanie na wyjściu Q poziomu logicznego, który w momencie nadejścia zbocza sygnału zegarowego znajdował się na wejściu D, można prześledzić obieg stanów logicznych w tym układzie.
Opis układu
Schemat ideowy można podzielić na następujące bloki:
- układ sekwencyjny generujący ciągi bitów,
- lokalny generator sygnału zegarowego,
- układ sterowania zasilaniem cewek,
- bufory wyjściowe,
- obwody zabezpieczające wejścia sygnałów sterujących.
Działanie tego nieskomplikowanego układu sekwencyjnego polega na wytwarzaniu czterobitowych ciągów podawanych na wyjścia sterujące cewkami i zostało szczegółowo omówione we wstępie teoretycznym. Dodać należy, że został on zbudowany na przerzutnikach zawartych w układzie CD4013. Wynika z tego, iż ich zadziałanie odbywa się na narastającym zboczu sygnału zegarowego, co ma znaczenie przy podawaniu zewnętrznego sygnału taktującego. Bramki XOR pochodzą z układu CD4030.
Lokalny generator sygnału zegarowego oferuje możliwość wprawienia silnika w ruch w sytuacji, gdy nie zachodzi konieczność taktowania go z zewnętrznego, dokładnego źródła. Taka sytuacja może mieć miejsce np. w czasie testów. Wykonano go z dwóch pozostałych bramek XOR pełniących rolę negatorów. Zakres częstotliwości generowanego sygnału zegarowego zawiera się w przedziale od ok. 1 Hz do ok. 29 Hz przy zasilaniu napięciem 12 V. Regulacji dokonuje się potencjometrem P1. Rezystor R1 ustala górną częstotliwość, a rezystancja ścieżki P1 – dolną.



















