




- Zasilanie 15…35 V DC (po wykonaniu modyfikacji: 9…15 V DC).
- Pobór prądu ok. 70 mA (z dołączonym transoptorem).
- Regulacja prędkości silnika przez zmianę wypełnienia sygnału zasilającego.
- Wbudowane obwody zabezpieczające przed przepięciem.
- Częstotliwość PWM regulowana: 10 Hz, 20 Hz, 50 Hz, 100 Hz, 200 Hz, 500 Hz, 1 kHz, 2 kHz, 5 kHz, 10 kHz, 20 kHz, 50 kHz.
- Regulowany dzielnik impulsów wejściowych z zakresu 1…99.
- Prędkość ustalana płynnie potencjometrem.
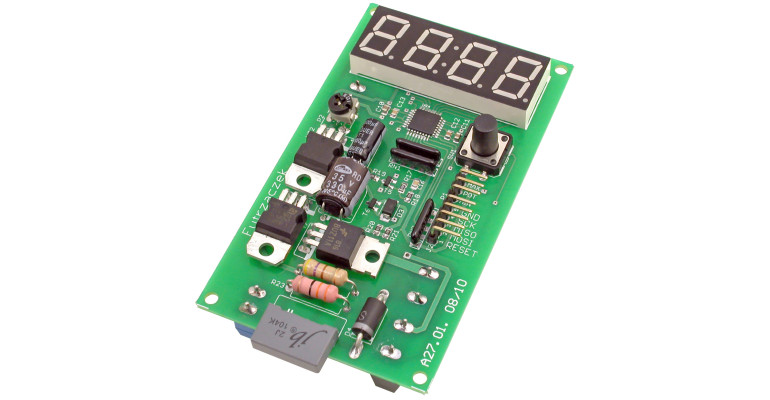
- Czytelny, 4-cyfrowy wyświetlacz LED wskazujący aktualną prędkość (w impulsach na sekundę).
- Sygnalizacja osiągnięcia właściwych obrotów wału silnika.
- Maksymalna liczba impulsów z enkodera w czasie 1 s: 65535.
Silnik jest elementem wykonawczym, a tarcza z otworami na jego osi oraz transoptor szczelinowy wchodzą w skład pętli sprzężenia zwrotnego. Mikrokontroler mierzy częstotliwość impulsów generowanych przez transoptor i tak steruje wypełnieniem impulsów zasilających silnik, aby uzyskać zadaną (przez użytkownika) prędkość obrotową.
Głównym podzespołem, który steruje pracą urządzenia, jest mikrokontroler ATmega8. Częstotliwość sygnału zegarowego jest ustalona przez zewnętrzny rezonator kwarcowy 16 MHz. Znacząco zmniejsza to wpływ temperatury na funkcjonowanie układu oraz pozwoliło na dużą częstotliwość odświeżania ekranu. Jako wyświetlacz zastosowano czytelny, 7-segmentowy ekran LED o wysokości cyfr 14,2 mm. Sterowanie nim odbywa się w trybie multipleksowym. W celu uzyskania dużej jasności świecenia poszczególne cyfry są załączane przez tranzystory bipolarne o polaryzacji PNP.
Świeceniem segmentów steruje rejestr 74HC595. Jego wejście aktywujące bufory wyjściowe jest stale aktywne (wyprowadzenie 13 zwarte z masą), a wejście zerujące stale nieaktywne (wyprowadzenie 10 na potencjale +5 V). Dlatego do obsługi rejestru są potrzebne tylko trzy wyprowadzenia mikrokontrolera sterujące: linią danych (DS), zegarową (SHCP) i aktualizacji przerzutników wyjściowych po wpisaniu nowej zawartości (STCP). Prąd pojedynczego segmentu jest ograniczony do ok. 6 mA.
Do ustalenia prędkości obrotowej silnika służy zewnętrzny potencjometr przyłączany do złącza J2. Dzieli on napięcie zasilające mikrokontroler, które jest jednocześnie napięciem referencyjnym dla przetwornika A/C. Liczba odczytana z przetwornika stanowi podstawę do obliczenia zadanej prędkości obrotowej. Aby pomiary nie były zafałszowane przez zaburzenia indukujące się w przewodach połączeniowych, na jego wejściu zastosowano dolnoprzepustowy filtr RC o stałej czasowej ok. 1 ms.
Transoptor szczelinowy służący do pomiaru prędkości obrotowej dołącza się do zacisków złączy J4 i J6. Rezystor R15 zapewnia zasilanie diody nadawczej prądem ok. 20 mA. Impulsy światła padające na fototranzystor wprowadzają go w stan nasycenia, co przez mikrokontroler jest odczytywane jako wystąpienie zbocza opadającego. Właśnie na to zbocze reaguje licznik, ponieważ jest ono „szybsze” od narastającego, które powstaje przy wychodzeniu z nasycenia. Wejście kolektora fototranzystora jest zabezpieczone duodiodą Schottky'ego typu BAT54S. Wprawdzie mikrokontroler ma wbudowane takie diody, ale mogą one ulec uszkodzeniu w wypadku indukowania się w przewodach impulsów o dużej energii. Rezystor R16 ogranicza prąd tych diod w razie przepięcia. Potencjometr P1 służy do ustalenia rezystancji obciążenia kolektora fototranzystora, przy której będzie prawidłowo wchodził w nasycenie oraz nie będzie wrażliwy na światło zewnętrzne.
Licznik Timer1 mikrokontrolera generuje sygnał PWM, który jest dostępny na wyjściu OC1B. Ma on amplitudę 5 V, co jest niewystarczające do prawidłowego wysterowania większości tranzystorów MOSFET, dlatego wykonano stopień sterujący z tranzystorami T5 i T6. Funkcją tranzystora T5 z obciążeniem w postaci rezystora R20 jest zwiększenie amplitudy impulsów do 12 V. Sygnał ulega przy tym zanegowaniu, co trzeba uwzględnić na etapie pisania programu. Rezystor R18 ogranicza prąd jego bazy, natomiast kondensator C16, który go bocznikuje, przyśpiesza przeładowywanie bazy. Rezystor R19, połączony szeregowo z C16, ogranicza prąd płynący przez wyprowadzenie mikrokontrolera w trakcie wystąpienia zbocza.
Kolektor T5 ma małą rezystancję przy wchodzeniu w nasycenie, a wielokrotnie wyższą, bo zbliżoną do rezystancji R20, przy wychodzeniu zeń, co jest niepożądane. Takiej sytuacji można zapobiec, stosując tranzystor T6, który pełni funkcję wtórnika napięciowego dla zboczy narastających. Gdy potencjał jego bazy się podnosi, wtedy emiter „wlewa” prąd do obciążenia. Impedancja wyjściowa jest wtedy rzędu pojedynczych omów. Natomiast zbocze opadające jest obsługiwane za pośrednictwem diody D3, która cechuje się dużą odpornością na udary prądowe. Nasycający się T5 „wyciąga” prąd z obciążenia, polaryzując ją w kierunku przewodzenia.
Połączone równolegle rezystory R21 i R22 ograniczają prąd płynący przez bramkę w chwili jej przeładowywania. Rezystorem R23 bramka jest rozładowywana w chwili zaniku sygnału sterującego, polaryzuje również tranzystor T6. Dioda Zenera D4 chroni izolację bramki przed przebiciem wskutek przekroczenia maksymalnego napięcia UGS.
Zasilany silnik powinien być dołączony do zacisków złącza J6. Równolegle do niego włączono obwód zabezpieczający tranzystor MOSFET przed uszkodzeniem wywołanym przez przepięcia pochodzące od uzwojenia. Wartości tych elementów (R24, C18, D5) można dobrać w zależności od potrzeb (np. zmienić stałą czasową), lecz dla większości przypadków wystarczą te przykładowe.
Po włączeniu zasilania mikrokontroler potrzebuje nieco czasu na rozpoczęcie wykonywania programu. Przez ten czas wyprowadzenia portów są w stanie wysokiej impedancji. Tranzystor T5 nie przewodzi, więc bramka tranzystora MOSFET jest spolaryzowana wysokim potencjałem i silnik rusza z szarpnięciem. Dopiero po chwili, kiedy portom zostaną nadane kierunki przepływu oraz poziomy logiczne, silnik zatrzyma się. Dlatego został dodany rezystor R17, który wprowadza T5 w stan przewodzenia, zanim zrobi to mikrokontroler.
Nieużywane wyprowadzenia mikrokontrolera są podciągnięte do dodatniego bieguna zasilania poprzez zewnętrzne rezystory. W ten sposób mamy gwarancję ustalenia ich potencjału, nawet wtedy, gdy w pobliżu pracuje silne źródło zaburzeń. W tym układzie jest to o tyle istotne, że w pobliżu może pracować zasilany impulsowo silnik, zaś na samej płytce znajdują się ścieżki przewodzące prąd impulsowy o dużym natężeniu.
Napięć niezbędnych do prawidłowego działania układu dostarczają dwa stabilizatory liniowe, typu 7812 i 7805, połączone kaskadowo. Rozkłada to pomiędzy nie straty mocy. Dioda D1 doładowuje kondensator C1, z którego pierwszy stabilizator pobiera prąd. W ten sposób, nawet jeżeli napięcie z zasilacza ulega drastycznym zmianom wskutek cyklicznego załączania silnika, stabilizator zawsze ma do dyspozycji zapas napięcia niezbędny do prawidłowego działania.
Na płytce jest wiele kondensatorów o różnych pojemnościach, których rolą jest filtrowanie zasilania układów cyfrowych. Kondensatory C2…C5 zapobiegają wzbudzeniu się stabilizatorów liniowych. Z kolei kondensator C17 stanowi rezerwuar energii dla sterownika bramki tranzystora MOSFET. W miarę możliwości powinien być typu Low-ESR, ponieważ uzyskiwana szybkość narastania napięcia na bramce jest wysoka.



















