




Schemat elektryczny układu pokazano na rysunku 1. Sterownik zbudowano w oparciu o 8-wyprowadzeniowy mikrokontroler AT90S2343, do którego aktywnych wyprowadzeń dołączono proste układy wykonawcze i sterujące. Jako elementy wykonawcze, bezpośrednio zasilające dołączony do regulatora silnik, zastosowano cztery tranzystory MOSFET, pracujące w układzie mostka, w którego przekątnej został włączony silnik.
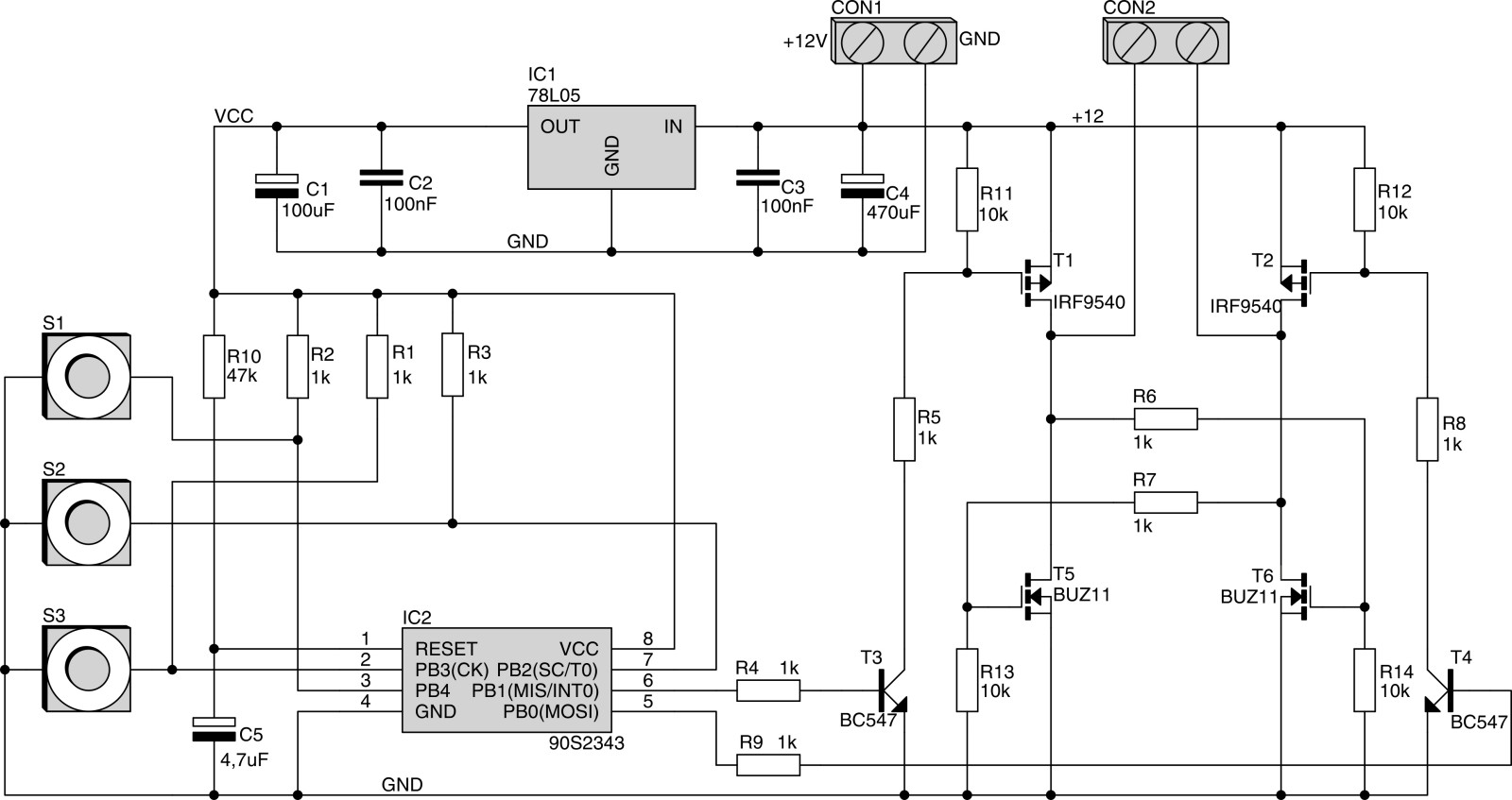
Pojawienie się stanu wysokiego na wyjściu PB1 układu IC2 spowoduje spolaryzowanie tranzystora T3, a w konsekwencji jednoczesne włączenie tranzystorów T1 i T6 i obrót silnika w jednym kierunku. Podobnie spolaryzowanie bazy tranzystora T4 wywoła włączenie tranzystorów T2 i T5 i obrót silnika w kierunku przeciwnym. Pozostała część układu to typowy zasilacz, dostarczający napięcia +5 VDC, niezbędnego do zasilania procesora. Elementy R10, C5 są odpowiedzialne za zerowanie procesora podczas włączania zasilania.
Mikrokontroler nie wymaga zastosowania zewnętrznego rezonatora kwarcowego, gdyż ma wbudowany generator RC.
Oprogramowanie sterujące pracą regulatora napisano w języku BASCOM AVR. W głównej pętli programowej dokonywane są wstępne obliczenia wartości zmiennych decydujących o współczynniku PWM. Podczas pracy programu w pętli głównej sprawdzany jest stan styków przycisków. W zależności od tego, wykonywane są odpowiednie reakcje programu.


















