




- Zakres regulacji prędkości: 0% do 100% wypełnienia cyklu pracy
- Napięcie zasilania silnika: od niemal zerowego do maksymalnie 30 V
- Zasilanie regulatora: 10,5 V do maksymalnie 30 V (5,5…26 V z odłączoną, zwartą diodą ZD1)
- Wskazanie prędkości: jasność LED1 zmienia się wraz z wypełnieniem cyklu pracy PWM
- Częstotliwość PWM: 16 kroków od 30,6 Hz do 32,4 kHz
- Zakres łagodnego startu: 0…2 sekund w 255 krokach dla wypełnienia cyklu pracy od 0% do 100%
- Regulacja krzywej prędkości: minimalna prędkość może być ustawiona na 0…33% wypełnienia cyklu pracy
- Próg odłączenia przy niskim napięciu zasilania (under voltage – UV): 0…30 V w krokach co 29,6 mV
- Histereza UV: 0…5 V w krokach co 29,6 mV
- Wskazanie UV: dioda LED1 miga przez 65 ms z częstotliwością 1 Hz
- Wykrywanie odłączenia silnika: silnik jest wyłączany, jeśli monitorowany prąd spadnie do zera podczas zasilania silnika; sygnalizowane miganiem diody LED 2 Hz/50% wypełnienia cyklu świecenia
- Wykrywanie odłączenia potencjometru prędkości: sygnalizowane słabo świecącą diodą LED
- Regulator PWM silnika prądu stałego
- Może zasilać silniki o napięciu znamionowym do 24 V i 20 A DC
- Napięcie zasilania silnika i regulatora może być oddzielone
- Możliwość wyboru 16 częstotliwości PWM
- Regulacja sprzężenia zwrotnego obciążenia silnika i regulacja wzmocnienia
- Regulowana szybkość łagodnego rozruchu
- Regulacja krzywej prędkości silnika
- Odcięcie zasilania przy zbyt niskim napięciu ze wskaźnikiem LED i regulowaną histerezą
- Wskaźnik LED cyklu pracy
- Opcjonalne wykrywanie odłączenia silnika
Istnieje wiele zastosowań silników prądu stałego, w których regulacja prędkości jest pożądana lub konieczna. Ponieważ silniki DC mogą być zasilane bezpośrednio z akumulatorów, są one używane w wózkach golfowych, elektrycznych skuterach, rowerach, hulajnogach i deskorolkach, zdalnie sterowanych samochodach i łodziach – lista jest długa.
W większości tych zastosowań potrzebny jest sposób regulacji prędkości obrotowej silnika. Jazda na maksymalnej prędkości przez cały czas nie zawsze jest dobrym pomysłem!
Regulator prędkości, taki jak ten zaprezentowany, jest idealnym rozwiązaniem. Może on obsługiwać silniki prądu stałego o napięciu znamionowym do 24 V (maksymalnie 30 V) i prądzie o ciągłym natężeniu do 20 A.
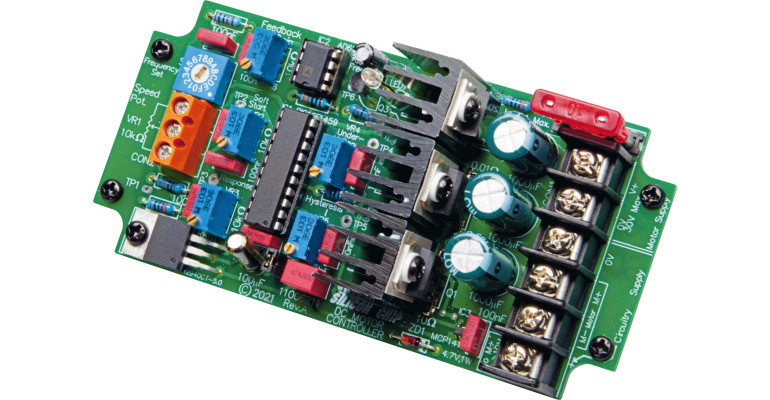
Regulator jest prezentowany jako nieosłonięty moduł elektroniczny zbudowany na płytce drukowanej, który w razie potrzeby można umieścić w standardowej plastikowej obudowie UB3. Zawiera on wytrzymałe zaciski dla zasilania i podłączeń silnika, a także dodatkowe zaciski dla potencjometru regulacji prędkości, który jest montowany poza płytką drukowaną.
W celu chłodzenia komponenty zasilające silnik są zamontowane na sporych radiatorach. Regulowane funkcje, takie jak czas trwania miękkiego startu i wzmocnienie sprzężenia zwrotnego, są ustawiane za pomocą wbudowanych wieloobrotowych potencjometrów nastawnych, z punktami testowymi do pomiaru napięcia. Wbudowana dioda LED wskazuje ustawienie prędkości, a także błędy, takie jak niski poziom naładowania akumulatora lub odłączenie silnika.
Konstrukcja regulatora prędkości
Chociaż w przeszłości publikowaliśmy opisy wielu regulatorów prędkości silnika DC, ta wersja ma więcej funkcji i lepszą wydajność. Prędkość silnika jest sterowana za pomocą modulacji szerokości impulsu (PWM). Oznacza to, że silnik jest napędzany serią impulsów włączania i wyłączania napięcia, a nie zasilaniem DC o zmiennym poziomie napięcia, dzięki czemu jest bardziej wydajny.
Sterowanie prędkością silnika odbywa się poprzez zmianę szerokości impulsu. Stosunek szerokości impulsu do odstępu między impulsami to cykl pracy. Niskie wypełnienie cyklu pracy będzie dostarczać napięcie do silnika tylko przez niewielką część czasu, a silnik będzie pracował powoli.
Wraz ze wzrostem czasu trwania impulsu, cykl pracy o większym wypełnieniu sprawia, że silnik pracuje szybciej, aż osiągnie 100% wypełnienia cyklu i będzie zasilany w sposób ciągły.
Na oscylogramie 1, górny (żółty) przebieg jest sygnałem sterującym dla MOSFET-ów Q1 i Q2. Gdy jest on wysoki, silnik jest zasilany. W tym przypadku wypełnienie cyklu pracy jest bardzo niskie i wynosi około 9,5%, więc silnik pracuje powoli. Dolny cyjanowy przebieg jest związany z prądem pobieranym przez silnik. Wartość tego prądu służy do utrzymywania stałej prędkości silnika przy zmiennym obciążeniu.
Oscylogram 2 ma te same dwa przebiegi, ale tym razem wypełnienie cyklu pracy jest znacznie większe, a silnik obraca się szybciej. Silnik jest mniej obciążony niż na oscylogramie 1, więc odczyt prądu jest niższy pomimo wyższego wypełnienia cyklu pracy.
Co nowego w układzie
Jednym z problemów związanych ze sterowaniem silnikami prądu stałego za pomocą PWM jest to, że silnik może generować dodatkowy hałas z powodu wibracji uzwojeń silnika i innych części mechanicznych przy częstotliwości PWM. Można to do pewnego stopnia złagodzić, dobierając częstotliwość PWM tak, aby generowała minimalny hałas.
Hałas ten ma tendencję do zmniejszania się wraz ze wzrostem częstotliwości PWM i jest w większości eliminowany przy częstotliwościach PWM powyżej 20 kHz (przy górnej granicy ludzkiego słuchu).
Zwiększanie częstotliwości może jednak powodować problemy. Utrzymanie prędkości silnika przy zmiennym obciążeniu staje się trudniejsze przy użyciu tradycyjnego systemu sprzężenia zwrotnego. Bardzo wysokie częstotliwości PWM mogą również powodować utratę momentu obrotowego silnika.
Problemy te i ich rozwiązania opisano bardziej szczegółowo w oddzielnej sekcji zatytułowanej „Pułapki sterowania PWM silnikiem przy wyższych częstotliwościach”.
Sterownik ten umożliwia regulację częstotliwości PWM poza zakresem słyszalności, jednocześnie rozwiązując problemy związane z ograniczonym momentem obrotowym silnika przy niskich prędkościach i sterowaniem przy wyższych częstotliwościach.
Inne wbudowane funkcje obejmują łagodny rozruch, odcięcie zasilania przy niskim napięciu akumulatora, wskaźnik stanu LED i opcjonalne wykrywanie odłączenia silnika. Funkcje te można łatwo skonfigurować i ustawić za pomocą potencjometrów.
Adaptacja do wydania polskiego – Andrzej Nowicki





















