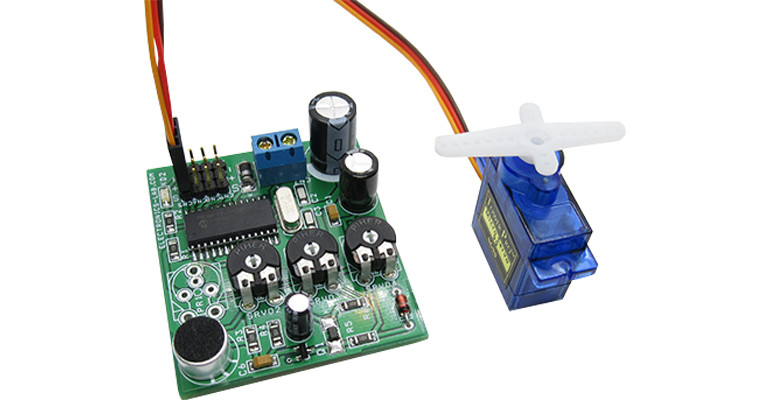

Projekt porusza serwomechanizmem RC po otrzymaniu dowolnego rodzaju dźwięku. Kąt obrotu zależy od poziomu dźwięku, im wyższy poziom dźwięku tym więcej ruchu. Ruch serwomechanizmu jest proporcjonalny do poziomu dźwięku.
Układ ma 4 kanały serwomechanizmów, pierwszy kanał jest napędzany przez dźwięk, a pozostałe 3 serwomechanizmy RC są sterowane przez wbudowany potencjometr trymera, te 3 kanały pomagają napędzać inne ruchy figury animatronicznej.
Dźwięk odbierany przez mikrofon jest konwertowany na napięcie stałe, mikrokontroler PIC16F72 konwertuje napięcie stałe na sygnał RC PWM. Obwód działa z 5 V DC i zaleca się stosowanie baterii ze względu na niski jitter.
Charakterystyka
- Zasilanie 5 V do 6 V DC (1,5 V × 4 AA lub duża bateria 6 V SLA)
- 4- kanałowy ssterownik RC Servo
- Pierwszy kanał działa z dźwiękiem
- Trzy kanały działają z potencjometrami na płytce
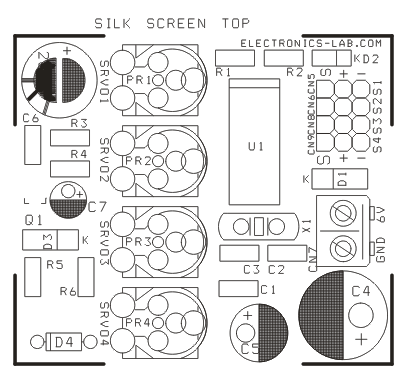
- CN7 Zasilanie
- D2 Dioda LED zasilania
- CN6, CN8, CN9 - złącza dla serwomechanizmów RC działających z potencjometrami
- Potencjometr trymera PR2=SERVO 2, PR3=SERVO 3, PR4=SERVO4
- CN5 Złącze dla RC Servo działającego z dźwiękiem
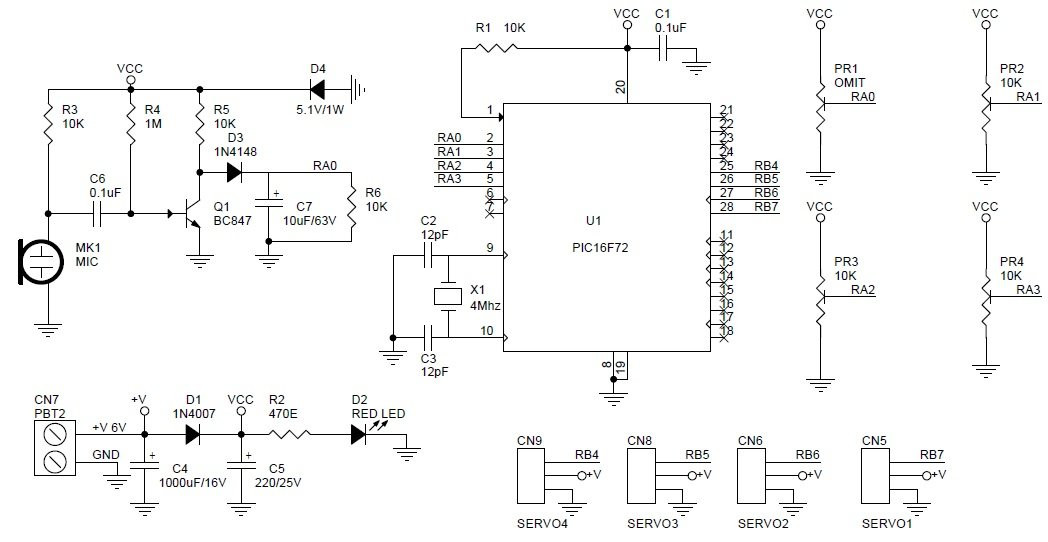
Schemat elektryczny z wejściem mikrofonowym
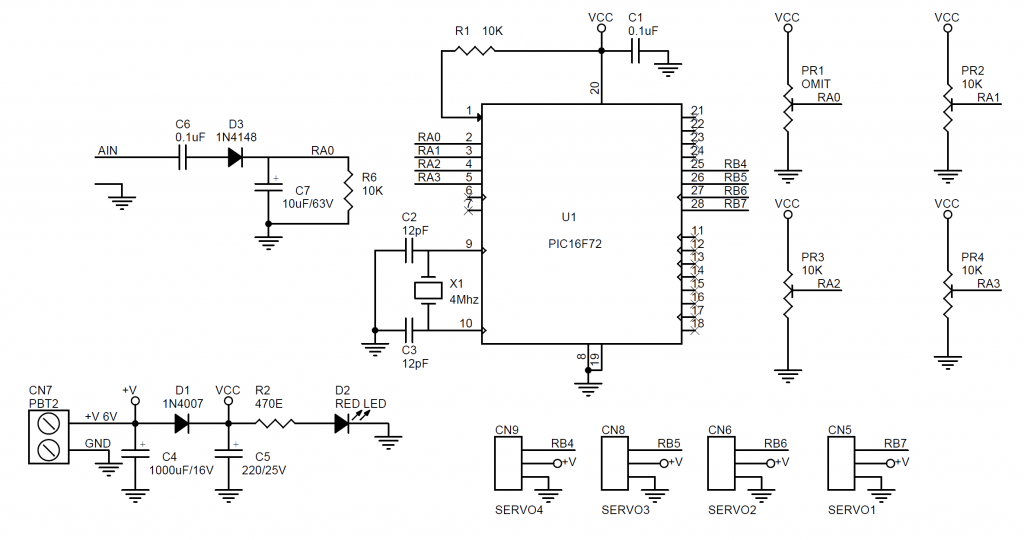
Schemat elektryczny z analogowym wejściem audio
Wykaz elementów
Ilość
Symbol
Nazwa/opis/gdzie kupić
1
PR1
Nie montować
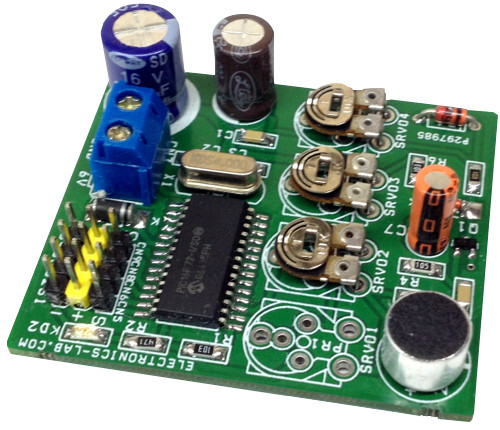
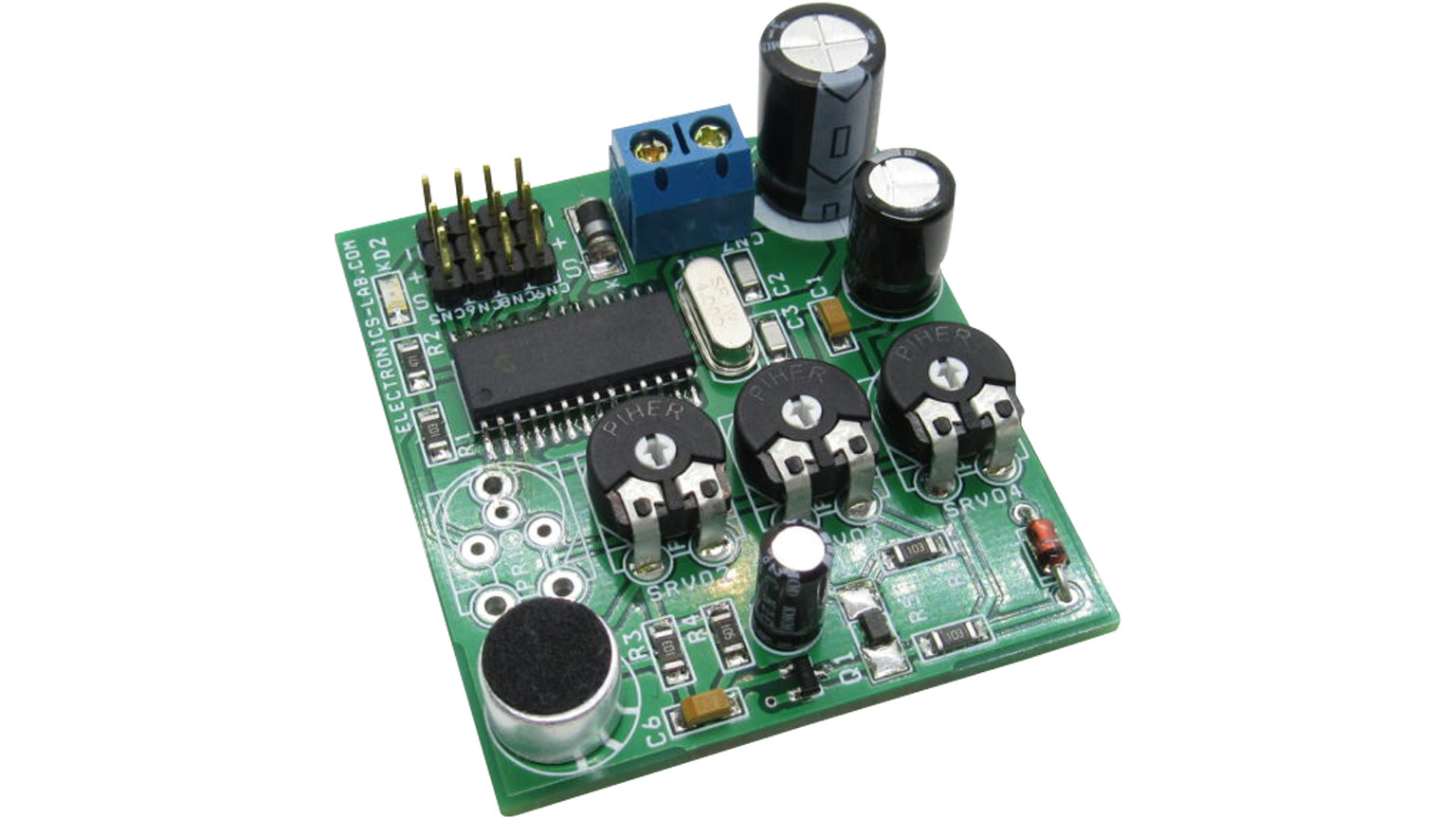
Zmontowany układ sterownika