




- ustawianie osi serwomechanizmu za pomocą potencjometrów,
- wybór jednego z trzech położeń za pomocą przełącznika,
- częstotliwość toru radiowego: 868 MHz,
- możliwość wyłączenia zasilania serwomechanizmu,
- zasilanie stałym napięciem 5…15 V,
- pobór prądu nadajnika ok. 30 mA; odbiornika: ok. 30 mA (nie licząc prądu pobieranego przez serwomechanizm).
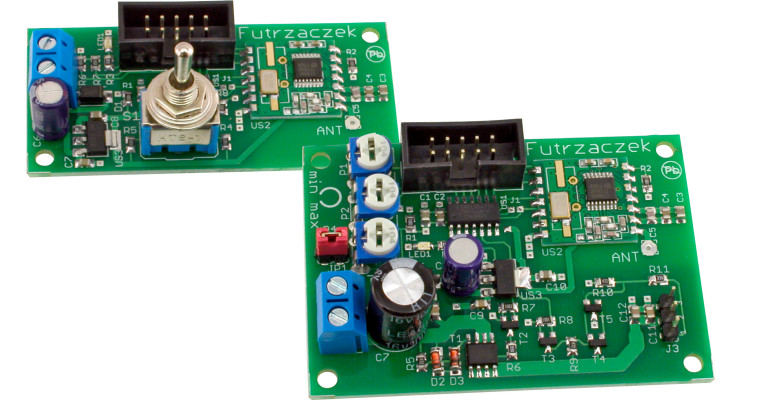
Układ składa się z dwóch modułów: nadajnika i odbiornika. Nadajnik posiada trójpozycyjny przełącznik oraz transceiver, który wysyła informację o położeniu przełącznika. Odbiornik posiada taki sam transceiver, który odbiera sygnał, dekoduje go i seruje serwomechanizmem. Ustawienie osi serwomechanizmu ustalają potencjometry montażowe, umieszczone na płytce odbiornika. Za pomocą przełącznika wybierany jest potencjometr, który odpowiada za położenie osi serwomechanizmu w danej chwili.
Budowa i działanie
Jako transceiver zastosowano gotowy moduł typu RFM12B firmy HopeRF, który pracuje w nielicencjonowanym paśmie 868 MHz. Nie posiada wbudowanej anteny, należy dołączyć zewnętrzną, np. w postaci odcinka przewodu. Dane oraz parametry pracy modułu radiowego przesyłane są interfejsem ISP.
Pracą toru radiowego zarządza niewielki i tani mikrokontroler typu Attiny24A. Źródłem zegara taktującego dla mikrokontrolera jest jego wewnętrzny oscylator RC, o nominalnej częstotliwości pracy 8 MHz (po wyłączeniu preskalera). Układ nie wykonuje żadnych zadań krytycznych czasowo, wobec czego stabilizacja tej częstotliwości przy użyciu rezonatora kwarcowego jest zbyteczna. O stanie układu sygnalizuje mała dioda LED, jej każdorazowy błysk oznacza nadanie odpowiednio zakodowanej informacji o położeniu przełącznika.
Przełącznik dźwigniowy typu MTS103 posiada trzy pozycje stabilne: dwie skrajne, kiedy styk wspólny jest zwarty z jednym ze styków skrajnych oraz trzecią, kiedy dźwignia znajduje się w środkowym położeniu i obie pary styków są rozwarte. Wykrycie przez mikrokontroler zwartej pary styków polega na sprawdzeniu stanów logicznych na liniach SW1 i SW2. Stan wysoki po rozwarciu zapewniają rezystory R4 i R5.
Wszystkie podzespoły zasilane są napięciem stałym o wartości 3,3 V, dostarczanym ze stabilizatora liniowego typu LD1117AS33TR, typu LDO. Minimalne napięcie wejściowe wynosi ok. 4,4 V (dropout wynosi około 1,1 V), co w połączeniu ze spadkiem na diodzie Schottky’ego, determinuje minimalne napięcie zasilające na poziomie 5 V. Maksymalne napięcie zostało określone przez producenta stabilizatora i wynosi 15 V.
Na płytce umieszczono złącze IDC do programowania mikrokontrolera, w którym styki są ułożone zgodnie ze standardem KANDA ISP. Programowanie odbywa się przy użyciu tych samych wyprowadzeń, co komunikacja z modułem radiowym. Aby nie dochodziło do konfliktów, trzeba zablokować interfejs SPI w module radiowym. Służy do tego rezystor R2, który podciąga wyprowadzenie NSEL do stanu wysokiego. Mikrokontroler, w czasie prawidłowej pracy, nadaje temu wyprowadzeniu stan niski, co aktywuje układ RFM12B.
Trzy wyprowadzenia mikrokontrolera nie są używane. Zostały spolaryzowane potencjałem masy za pomocą rezystorów R6…R8, aby nie gromadziły się na nich ładunki elektrostatyczne.



















