




Panuje przekonanie, że wykorzystanie fazowego regulatora mocy na triaku do tego celu nie jest możliwe. Jest to jednak przekonanie nie do końca słuszne. W przypadku niektórych silników i obciążeń zastosowanie sterowanego fazowo triaka pozwala regulować obroty w szerokim zakresie. Dostępne są układy scalone, wykorzystywane w takich prostych regulatorach fazowych. Pamiętając o ograniczeniach, jakie narzuca układ regulatora fazowego, można zbudować w bardzo prosty sposób poprawnie działający regulator obrotów silnika indukcyjnego.
Dlaczego to nie działa?
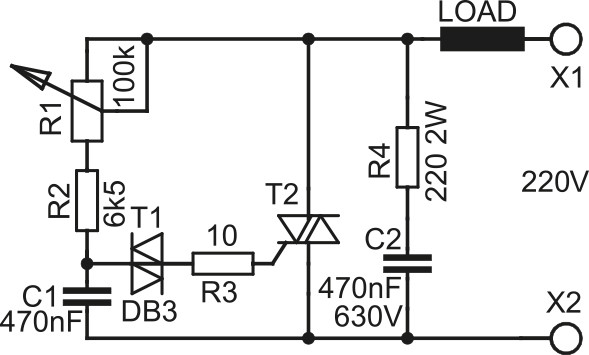
Spróbujmy zastanowić się, co stanie się po podłączeniu silnika indukcyjnego do typowego ściemniacza, zwykle zbudowanego według rysunku 1.
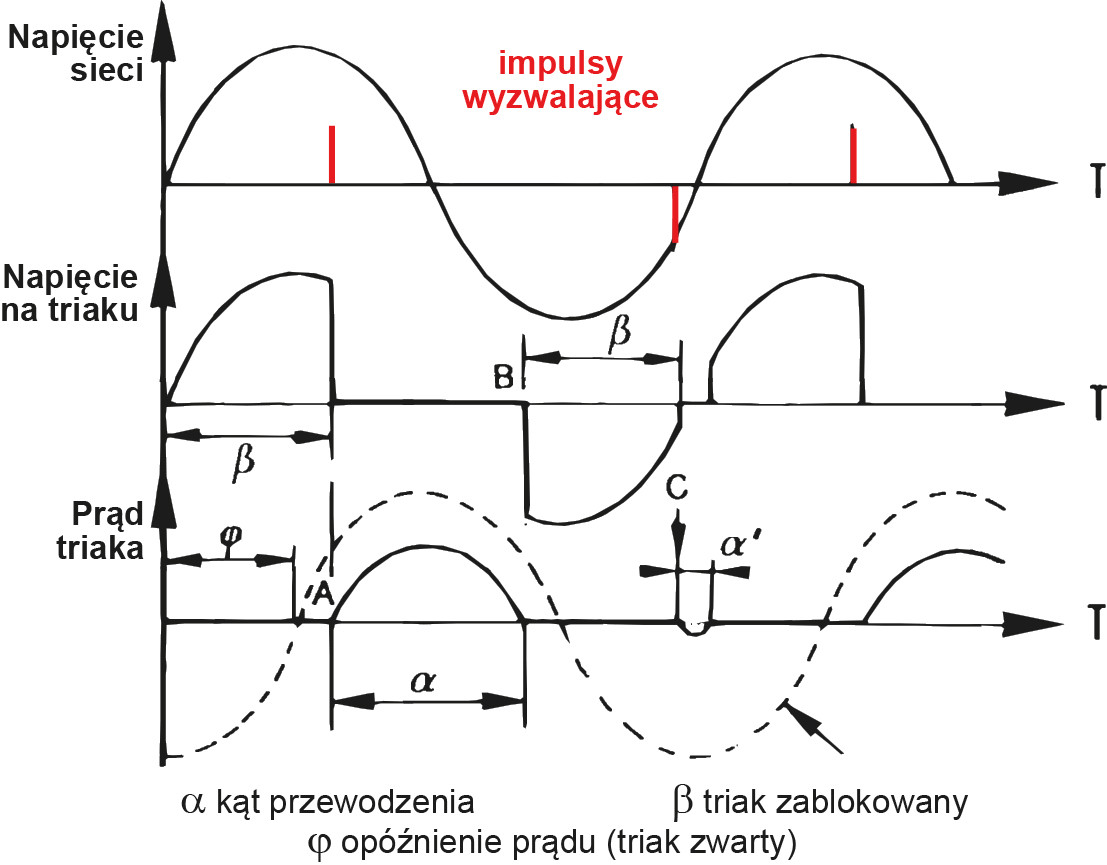
Rozważmy przypadek (rysunek 2), gdy triak włączany jest przy kącie β=100o po przejściu napięcia sieci przez zero. Kąt przewodzenia wyniesie około150o, a więc triak wyłączy się przy kącie około 250o w punkcie B. Na kondensatorze C1 pozostanie resztkowe napięcie dodatnie, gdyż nie rozładowuje się on do końca przez bramkę triaka. W tym momencie na układzie wyzwalania pojawia się ujemne napięcie, które najpierw przeładuje resztkowe napięcie na C1, a potem spowoduje wyzwolenie triaka przy kącie około 350o. Drugie włączenie triaka nastąpi więc przy bardzo niskim napięciu i kąt przewodzenia będzie dużo mniejszy niż przy pierwszym. W kolejnym okresie warunki są podobne, utrzymuje się więc znaczna asymetria włączania triaka w ujemnych i dodatnich półokresach. Taka asymetria jest nie do zaakceptowania w układzie sterowania silnika, może być nawet dla niego niebezpieczna ze względu na nasycanie się układu magnetycznego silnika składową stałą prądu.
Jak to działa?
Do standardowego układu ściemniacza dodane zostały cztery diody, dwa oporniki i potencjometr, jak pokazuje rysunek 3.
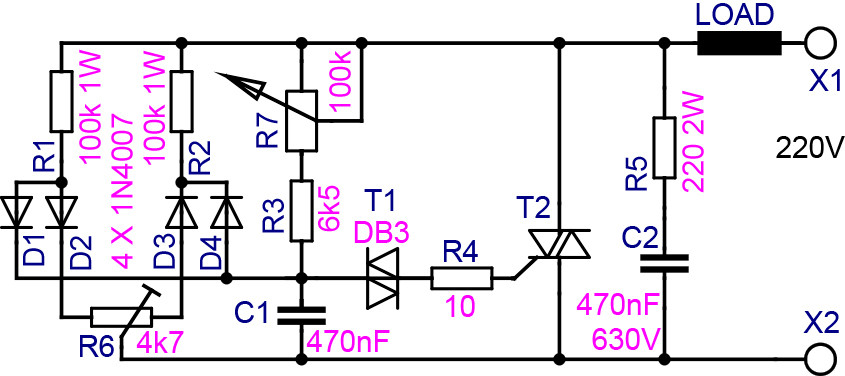
W pierwszym półokresie układ zachowuje się tak samo, jak układ z poprzedniego rysunku. Jednak po pojawieniu się ujemnego napięcia pozostałe na C1 dodatnie napięcie resztkowe jest rozładowywane przez diodę D4 i rezystor R2. Dioda D3 uniemożliwia dalsze doładowywanie C1 ujemnym napięciem, już po rozładowaniu napięcia dodatniego. Elementy D1, D2 i R1 pełnią analogiczną funkcję w dodatnim półokresie. W wyniku działania układu symetryzującego po kilku okresach asymetria jest eliminowana.
Elementy R5 i C2 eliminują szpilki napięciowe powstające po wyłączeniu triaka w punkcie B. Bez nich szybkie narastanie napięcia w szpilce (znaczna wartość dU/dT) mogłoby spowodować włączenie triaka.
Rezystor R4 zwiększa czas impulsu wyzwalającego. Bez niego czas ten wyznaczony byłby przez pojemność C1 i wewnętrzne rezystancje elementów C1, T1 i T2, i byłby zbyt krótki do poprawnego włączenia triaka. Prąd na obciążeniu indukcyjnym po włączeniu triaka narasta powoli, przy zbyt krótkim impulsie bramki może nie osiągnąć wartości prądu „zatrzaśnięcia” IL, i triak wyłączy się po zakończeniu impulsu bramkowego. IL dla typowych triaków wynosi od kilku do kilkudziesięciu miliamperów. (IL, latching current, to parametr określający jaki minimalny prąd musi płynąć między anodami triaka, aby podtrzymać przepływ prądu po zaniku prądu bramki).
Montaż i uruchomienie
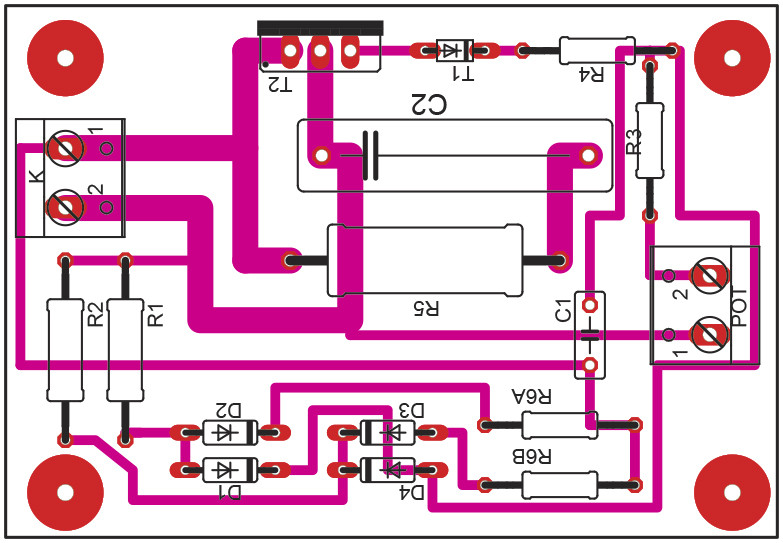
Układ można zmontować na płytce drukowanej, pokazanej na rysunku 4. Montaż jest klasyczny, warto jednak zwrócić uwagę na fakt, że w czasie pracy na układzie występuje pełne napięcie sieci. Nie należy więc przesadzać z miniaturyzacją układu. Nie jest wykluczone, że regulator będzie pracował w środowisku o wysokiej wilgotności, a może nawet agresywnym chemicznie. Odległości między ścieżkami powinny więc być znaczne, co narzuca spore rozmiary płytki. Jako R7 warto zastosować potencjometr z plastikową ośką lub izolacyjny przedłużacz osi.
W zależności od mocy sterowanego silnika triak powinien być wyposażony w odpowiedni radiator.
Aby zabezpieczyć się przed przepływem prądu przez nieobracający się silnik, warto dobrać rezystancję potencjometru, na przykład dodając równoległy rezystor. Zjawisko takie może wystąpić gdy włączymy zasilanie przy potencjometrze ustawionym na bardzo małe obroty. Zwykle nie jest jednak ono groźne dla silnika ze względu na mały prąd płynący w uzwojeniach.
Układ nie wymaga uruchamiania, prawidłowo zmontowany działa poprawnie.
Możliwości zmian
Potencjometr R6 służy do regulacji symetrii, zwykle jednak nie jest ona potrzebna i potencjometr może być zastąpiony dwoma opornikami. Ich wartość nie jest krytyczna (470Ω do 2k2), ale powinna być jednakowa dla obu oporników.
Rozwiązanie to zastosowano w prezentowanym układzie.
W przypadku konieczności sterowania silnika o bardzo małej mocy (kilkanaście, a może nawet kilka watów) może pojawić się problem. Silnik taki pobiera bardzo mały prąd, mogą więc wystąpić opisane trudności z włączaniem triaka. Dodatkowo, przy spadku prądu poniżej prądu podtrzymania (IH, holding current, to parametr określający, jaki minimalny prąd musi płynąć między anodami triaka, aby podtrzymać przepływ prądu, jest on zwykle nieco mniejszy niż IL) triak wyłączy się. Należy więc zastosować elementy o odpowiednio niskim IL oraz IH, są one jednak trudno dostępne.
Literatura:



















