




Zastosowanie bezszczotkowych silników prądu stałego (BLDC) jest coraz powszechniejsze. Jednak ich sterowanie wymaga zazwyczaj informacji o położeniu wirnika w celu wybrania odpowiedniego kąta komutacji. Normalnie, czujnik Halla jest używany do wykrywania pozycji wirnika. Jednak w zastosowaniach wrażliwych na koszty, często pożądany jest schemat komutacji bez czujnika. Opisany tutaj układ sterownika bezszczotkowego silnika DC wykorzystuje układ DRV10866 do napędzania małego wentylatora BLDC, bez użycia jakichkolwiek czujników położenia. Prędkość wentylatora BLDC może być zmieniana płynnie, bez typowych kroków związanych z normalnym wentylatorem AC.
Układ sterownika bezszczotkowego silnika DC
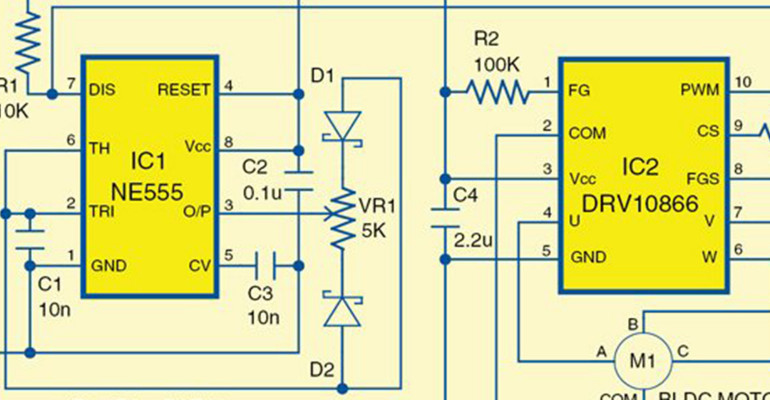
Rysunek 1 pokazuje układ bezczujnikowego sterownika silnika BLDC. Układ jest zbudowany z NE555 (IC1), DRV10866 (IC2) i kilku innych elementów.
Układ sterownika DRV10866 od Texas Instruments jest używany do napędzania małego trójfazowego silnika BLDC (M1). Układ jest trójfazowym, bezczujnikowym sterownikiem silnika ze zintegrowanymi MOSFET-ami mocy o zdolności prądowej do 680 mA w punkcie szczytowym.
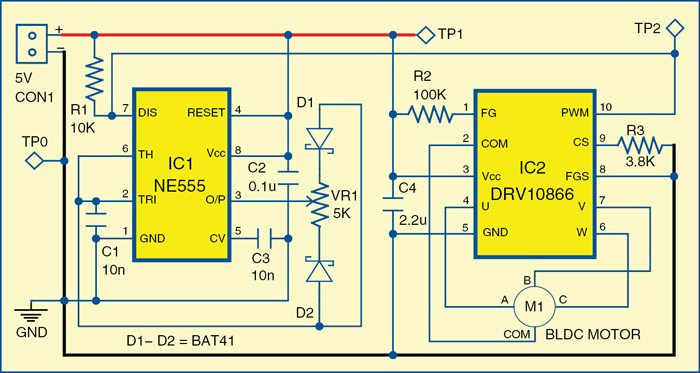
Na styku 1 układu IC2 zastosowano rezystor podciągający 100k (R2). Piny 2, 4, 7 i 6 układu IC2 są podłączone odpowiednio do punktu wspólnego, fazy A, fazy B i fazy C silnika BLDC. Pin 10 układu scalonego IC2 jest podłączony do pinu 7 układu scalonego IC1, aby uzyskać sygnał modulacji szerokości impulsu (PWM) z układu scalonego IC1 w celu sterowania prędkością silnika BLDC.
Sygnał wyjściowy (PWM) jest dostępny na IC1 pin 7 (DIS), a nie z normalnego wyjścia pin 3 układu scalonego. Cykl pracy sygnału PWM o częstotliwości 25 kHz (około) może być regulowany w zakresie od 5% do 95% za pomocą potencjometru VR1. Prędkość silnika BLDC może być kontrolowana poprzez zmianę cyklu pracy sygnału PWM. Przekręcając VR1 w kierunku przeciwnym do ruchu wskazówek zegara, zmniejsza się cykl pracy, co z kolei zmniejsza prędkość silnika i odwrotnie.
Budowa i testowanie
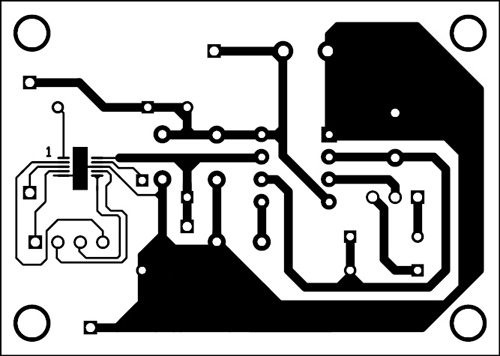
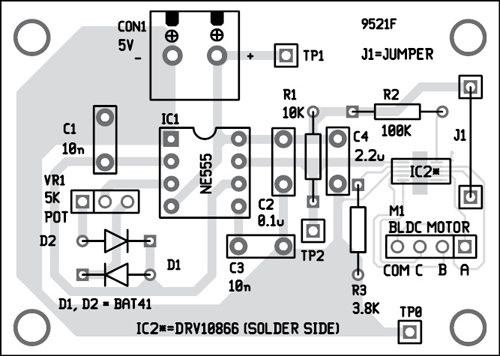
Jednostronna płytka drukowana dla sterownika bezszczotkowego silnika prądu stałego jest pokazana na rysunku 2, a jej rozmieszczenie elementów na rysunku 3. Układ należy zmontować na zalecanej płytce drukowanej, aby zminimalizować błędy montażowe. Układ scalony IC2 powinien być zamontowany po stronie lutowanej płytki drukowanej.
Po zmontowaniu komponentów, podłącz zasilanie 5 V DC do złącza CON1. Aby przetestować poprawność działania tego układu sterownika bezszczotkowego silnika DC, sprawdź poprawność zasilania układu napięciem 5 V na złączu TP1 w stosunku do TP0. Przekręć VR1 zgodnie z ruchem wskazówek zegara lub przeciwnie do ruchu wskazówek zegara, aby zwiększyć lub zmniejszyć prędkość silnika.
Więcej ekscytujących projektów układów: kliknij tutaj
Ten artykuł został po raz pierwszy opublikowany 6 lutego 2017 r. i został zaktualizowany 15 grudnia 2020 r.


















