
- Napięcie zasilania: 6…26 V
- Pobór prądu: 20 mA (sam regulator, bez współpracujących urządzeń)
- Napięcie zasilające odbiornik i mostki H: 5 V, pobór prądu (sumaryczny) <80 mA
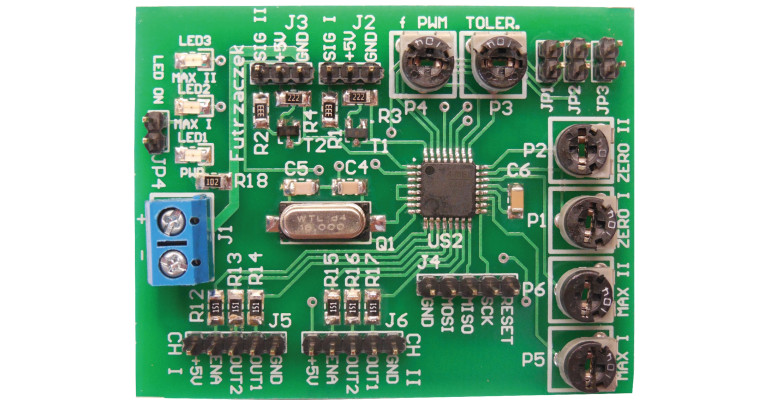
- Wymiary: 75 mm (szer.) ×50 mm (dług.) ×25 mm (wys.)
- Liczba obsługiwanych kanałów: 2
- Uwagi do użytych mostków H: muszą obsługiwać sygnały wejściowe w standardzie 0/5V i być odporne na podanie „00” na wejścia sterujące
- Częstotliwość generowanego sygnału PWM: 10…200 Hz
- Sposób kalibracji: ustawienie potencjometrami środkowej i maksymalnej szerokości impulsu
Opisany projekt urządzenia służy do sterowania dwoma silnikami prądu stałego za pomocą „impulsów serwomechanizmowych” przesyłanych przez aparaturę do zdalnego sterowania do odbiornika. Silniki są zasilane za pośrednictwem elementów wykonawczych w postaci mostków H.
Aparatura lotnicza jest przeznaczona głównie do sterowania serwomechanizmami, chociaż coraz częściej do napędu modeli są używane również silniki elektryczne, więc można nabyć tzw. regulator modelarski i za pomocą aparatury kontrolować pracę silników prądu stałego – najczęściej trójfazowych. Informacja o kierunku wychylenia drążka w nadajniku i odchyleniu od położenia zerowego jest odtwarzana w odbiorniku w postaci ciągu impulsów napięciowych o szerokości zależnej od położenia dźwigni. Zwykle, w popularnych aparaturach, te impulsy są powtarzane co 20…25 ms. Jest to sytuacja przykładowa, zworki umożliwiają dodatkową konfigurację tych wyjść.
Sterowanie, które daje najwięcej możliwości manewrowych, to odrębne sterowanie każdego z silników, gdzie każdy napędza koło (lub koła) na jednej stronie pojazdu: lewej i prawej. Umożliwia to np. skręcanie pojazdu w miejscu, kiedy jedna strona jedzie w kierunku przeciwnym do drugiej. Dlatego obydwa kanały działają niezależnie od siebie, może nawet działać tylko jeden z nich.