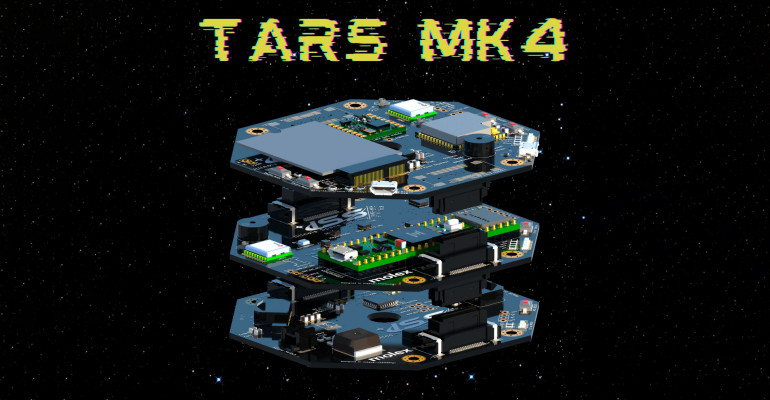

TARS MK4 jest flagowym, czwartym z rzędu komputerem pokładowym, zaprojektowanym do udziału w zawodach Spaceport America Cup 2023. Na rysunku 1 pokazano tę i wcześniejsze wersje systemu, co pozwala docenić trwający kilka lat proces rozwoju tego projektu.

Komputer ten ma zdolność do przesyłania danych telemetrycznych drogą radiową w czasie rzeczywistym, a także umożliwia śledzenie pozycji rakiety z wykorzystaniem GPS, autonomiczne ocenianie jej stanu podczas lotu oraz kontrolowanie apogeum rakiety za pomocą mechanizmu hamulca aerodynamicznego. Hamulec aerodynamiczny, po uruchomieniu, generuje opór, spowalniając rakietę i umożliwiając osiągnięcie określonej wysokości wymaganej w danej konkurencji, co ma duże znaczenie w zawodach rakiet amatorskich.
Zespół projektowy
Zespół składa się z około 100 studentów inżynierii z Uniwersytetu Illinois w Urbana-Champaign. Ich celem jest zostanie jednym z pierwszych zespołów akademickich, które zaprojektują, zbudują i wystrzelą dwustopniową rakietę na wysokość 100 km - na poziom tak zwanej linii Kármána, która jest umowną granicą kosmosu. Autorzy, mimo że mają przed sobą jeszcze długą drogę do przebycia, prezentują fragment jednego z projektów zakończonych w 2023 roku. Osoby zainteresowane organizacją Illinois Space Society lub zespołem Spaceshot mogą odwiedzić stronę internetową grupy: https://www.illinoisspacesociety.org/.
Moduły
Przedstawiony komputer ma konstrukcję modułową. Urządzenie składa się z trzech połączonych ze sobą płytek drukowanych. Jedna z nich odpowiada za zasilanie (PMB), druga wyposażona jest w główny mikrokontroler systemu wraz z zestawem sensorów, odpowiadających za kontrolę lotu (FCB), a trzecia mieści na sobie wszystkie moduły, niezbędne do telemetrii (TELEM).
Wszystkie projekty w zespole stworzono z wykorzystaniem pakietu KiCAD, który został wybrany jako jeden z najlepszych dostępnych, bezpłatnych pakietów oprogramowania do projektowania elektroniki. Zespół stworzył wewnętrzny przewodnik dotyczący wspólnej pracy nad projektami w KiCAD - wprowadzone zostały ścisłe wytyczne, mające na celu uniknięcie konfliktów plików, które mogą łatwo wystąpić przy współpracy wielu inżynierów, operujących na jednym projekcie. Na stronie z dokumentacją projektu znaleźć można wspomniane przewodniki, dotyczące współtworzenia projektów w KiCADzie oraz stosowania repozytorium na GitHubie.
Projektując nowy system, zespół często tworzy również diagramy blokowe, aby lepiej zrozumieć działanie całego urządzenia. Wybrane przez zespół narzędzie do rysowania diagramów, również jest bezpłatne i dostępne online - Draw.io.
Mikrokontroler
Do opisywanego systemu zespół wybrał moduł Teensy 4.1, ponieważ jest on kompatybilny z Arduino, niezwykle szybki i ma dużą liczbę linii I/O. Na pokładzie znajduje się również moduł z mikrokontrolerem ESP32-S3 i ATmega328P (jako pomocniczy mikrokontroler, dedykowany do telemetrii i zarządzania systemem zasilania w układzie).
Czujniki
Następnym krokiem było podjęcie decyzji, jakiego rodzaju czujników użyć. Autorzy rozpoczęli od selekcji interfejsu, który miałby być podstawową magistralą systemu - wybór padł na SPI, ponieważ zwykle oferuje on większą częstotliwość zbierania danych niż I²C.
Do oszacowania stanu rakiety używana jest kombinacja barometrów, akcelerometrów, żyroskopów i magnetometrów. W zależności od poziomu złożoności systemu można zintegrować w nim nawet kilka akcelerometrów - różnych układów o niskim i wysokim zakresie mierzonego przyspieszenia, aby uzyskać precyzyjniejsze dane we wszystkich fazach lotu.
Autorzy skorzystali z prostych do integracji sensorów:
- barometru MS5611,
- 9-osiowego modułu inercyjnego BNO0855 (akcelerometr, żyroskop i magnetometr),
- odbiornika sygnału GPS MAX-M10S.
Te trzy elementu powinny zaspokoić większość podstawowych potrzeb w zakresie estymacji stanu rakiety w każdej fazie lotu.
Stabilizacja napięcia
Do zasilania TARS MK4 wykorzystywany jest pakiet akumulatorów w konfiguracji 2S3P, co oznacza, że połączone są dwa akumulatory szeregowo, a następnie trzy takie zestawy łączone są równolegle. W projekcie użyto standardowych akumulatorów Adafruit 3,7 V 18650, co daje sumaryczne napięcie całego pakietu w zakresie od 6 V do 8,4 V. Ponieważ do zasilania serwa w systemie potrzebne jest napięcie nie większe niż 6 V, autorzy zdecydowali się na zintegrowanie przetwornicy obniżającej napięcie, ze względu na jej stosunkowo wysoką sprawność.
Twórcy systemu rekomendują wykorzystanie programu Webench Power Designer firmy Texas Instruments. Jest to doskonałe narzędzie pomagające w projektowaniu układów zasilania. Środowisko to jest dostępne w chmurze, poprzez stronę Texas Instruments i pozwala wybierać z szerokiej oferty tego producenta oraz dostosowywać projekty referencyjne do konkretnej aplikacji. Dzięki temu w prosty sposób wyliczyć można wartości wszystkich elementów dyskretnych dookoła stabilizatora dla wymaganych parametrów sekcji zasilania.