





Początki tego projektu sięgają kilku lat wstecz – autor konstrukcji zbudował już w 2020 roku podobne urządzenie, jednak było ono bardzo proste i pozbawione wielu możliwości, jakie ma najnowsze opracowanie. Obecna konstrukcja jest kompaktową i unowocześnioną wersją urządzenia skonstruowanego w 2020 roku, które samo było zainspirowane reklamowanym w 2019 r. urządzeniem SANDSARA sfinansowanym w ramach kampanii crowdfundingowej w 2019 roku.
Przeprojektowanie trzyletniej konstrukcji zajęło autorowi sześć miesięcy. Po zakończeniu konstrukcji, którą dokumentował na swoim blogu, przygotował kompletny opis konstrukcji, który zawiera zestaw informacji dotyczących budowy tego układu.
Potrzebne elementy
Do zbudowania urządzenia potrzebna będzie drukarka 3D do wydrukowania szeregu elementów mechanicznych oraz narzędzia do lutowania, aby zmontować elektronikę do kontroli silników. Ponadto potrzebne będą:
- moduł ESP32 DevKit V1,
- dwa moduły TMC2208 lub TMC2209 – sterowniki silników krokowych,
- dwa silniki krokowe w rozmiarze NEMA 17,
- dwie krańcówki z magnesami (sensory Halla),
- sensor światła TSL2561,
- panelowe złącza USB-C oraz zasilania DC,
- płytka drukowana dla układu (autor udostępnia projekt odpowiedniej płytki PCB),
- około 1 metra paska LED RGBW SK6812 – autor zastosował wersję z 144 diodami na metr,
- złącza JST z dwoma, trzema, czterema i pięcioma pinami oraz pasujące do nich gniazda SMD,
- 4-calowe (100 mm) łożysko z podstawki obrotowej,
- śruby M3 i inserty M3 do osadzania na ciepło,
- pasek GT2 o długości 400 mm oraz pasujące do niego koła zębate.
Projekt elementów mechanicznych
Zaprezentowany robot do kinetycznej rzeźby zaprojektowany został tak, aby był wyjątkowo smukły. Po złożeniu cały układ ma mieć nie więcej niż 75 mm wysokości. Z uwagi na to w systemie jest wiele nakładających się na siebie części, głównie w miejscach, w których duża przekładnia theta mocuje się do płyty podstawy. Cały robot został zaprojektowany od podstaw w Fusion 360, a jego projekt jest udostępniony za darmo za pośrednictwem Fusion Team (link znaleźć można na stronie z projektem).
Po ściągnięciu projektu łatwo zauważyć, że jest to… 55 wersja tego projektu. Jak sam autor przyznaje: „Spędziłem w fazie projektowania więcej, niż chciałbym przyznać”. Projekt rozpoczął się od zgrubnego szkicu kształtu obudowy, a następnie została ona podzielona wzdłużnie, aby zapewnić możliwość łatwego drukowania. Następnie zaprojektowana została podstawa robota, wymodelowane zostało miejsce na duże łożysko do obrotu całości wokół własnej osi i dodany został centralny zestaw kół zębatych.
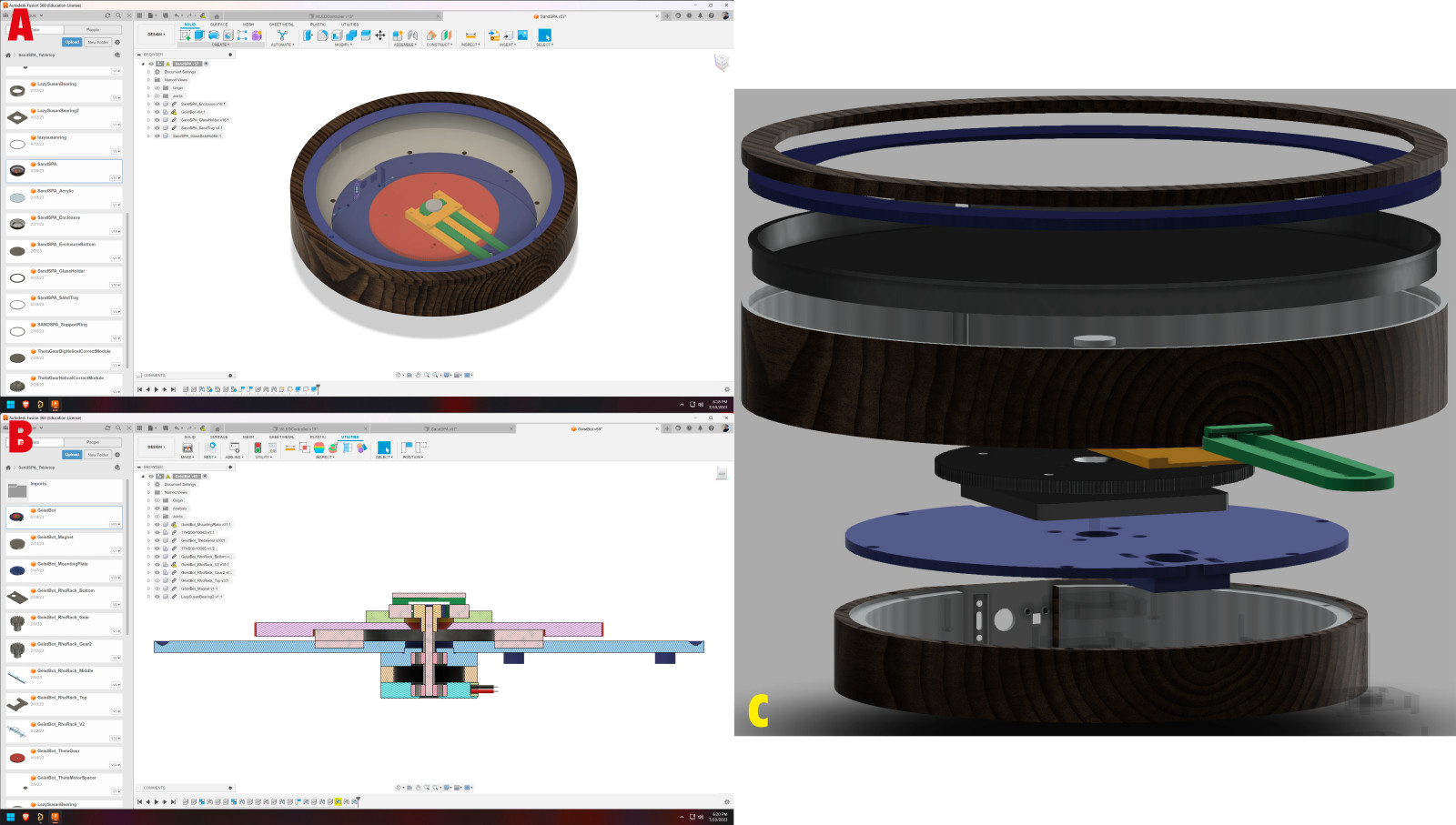
Projekt całego układu pokazano na rysunku 1a. Dodatkowo na rysunku 1b oraz 1c widać, odpowiednio, przekrój przez kluczowe elementy oraz widok rozstrzelony układu.
Wydruk w 3D
Całość została wydrukowana z użyciem czarnego tworzywa ABS firmy Polymaker z wypełnieniem typu gyroid w wysokości od 30% do 50%, w zależności od części. Na ogół wyższe wypełnienie dotyczyło elementów wewnętrznych, przenoszących naprężenia i siły w układzie, a sama zewnętrzna obudowa wydrukowana została z najmniejszym wypełnieniem, jakie pozwalało zachować jej sztywność.
Do wydrukowania elementów autor zużył niemalże 3 kg filamentu, który zakupił specjalnie do tego projektu. Dobrze jest zaopatrzyć się w odpowiednią ilość filamentu do druku, aby mieć zapas na wypadek jakichś awarii podczas drukowania itp. Autor wskazuje, że jeśli chodzi o druk, to PLA radziłby sobie lepiej jako materiał, szczególnie pod względem wypaczania się wydruku na skutek stygnięcia, jednak w tym projekcie zależało mu na właściwościach strukturalnych tworzywa ABS, stąd taka decyzja dotycząca materiału.


















