Analizując publikacje związane z bezszczotkowymi silnikami prądu stałego (ang. brushless DC motor lub w skrócie BLDC) trudno o jednolite uporządkowanie metod sterowania komutatorem elektronicznym. Pewne próby w tym kierunku można odleźć w pracach anglojęzycznych [4, 7, 9]. W literaturze krajowej najczęściej stosuje się podział strategii sterowania silników bezszczotkowych jedynie na sterowanie trapezowe i sterowanie sinusoidalne [2, 6].
W silnikach typu BLDC najczęściej stosuje się trapezowe (blokowe) metody sterowania – nazywając je klasycznymi. W artykule zaprezentowano kryteria podziału klasycznych metod sterowania bezszczotkowymi silnikami prądu stałego, rodzaje tych metod oraz omówiono pracę komutatora elektronicznego w stanie ustalonym.
Napęd z silnikiem BLDC
Schemat napędu z silnikiem BLDC w typowej konfiguracji zaprezentowano na rysunku 1. Wyróżniono na nim dwie grupy zaworów komutatora elektronicznego: grupę zaworów dodatnich oraz grupę zaworów ujemnych. W każdej z nich jedna z elektrod tranzystora jest odpowiednio dołączona – do dodatniego lub ujemnego bieguna źródła napięcia zasilania.
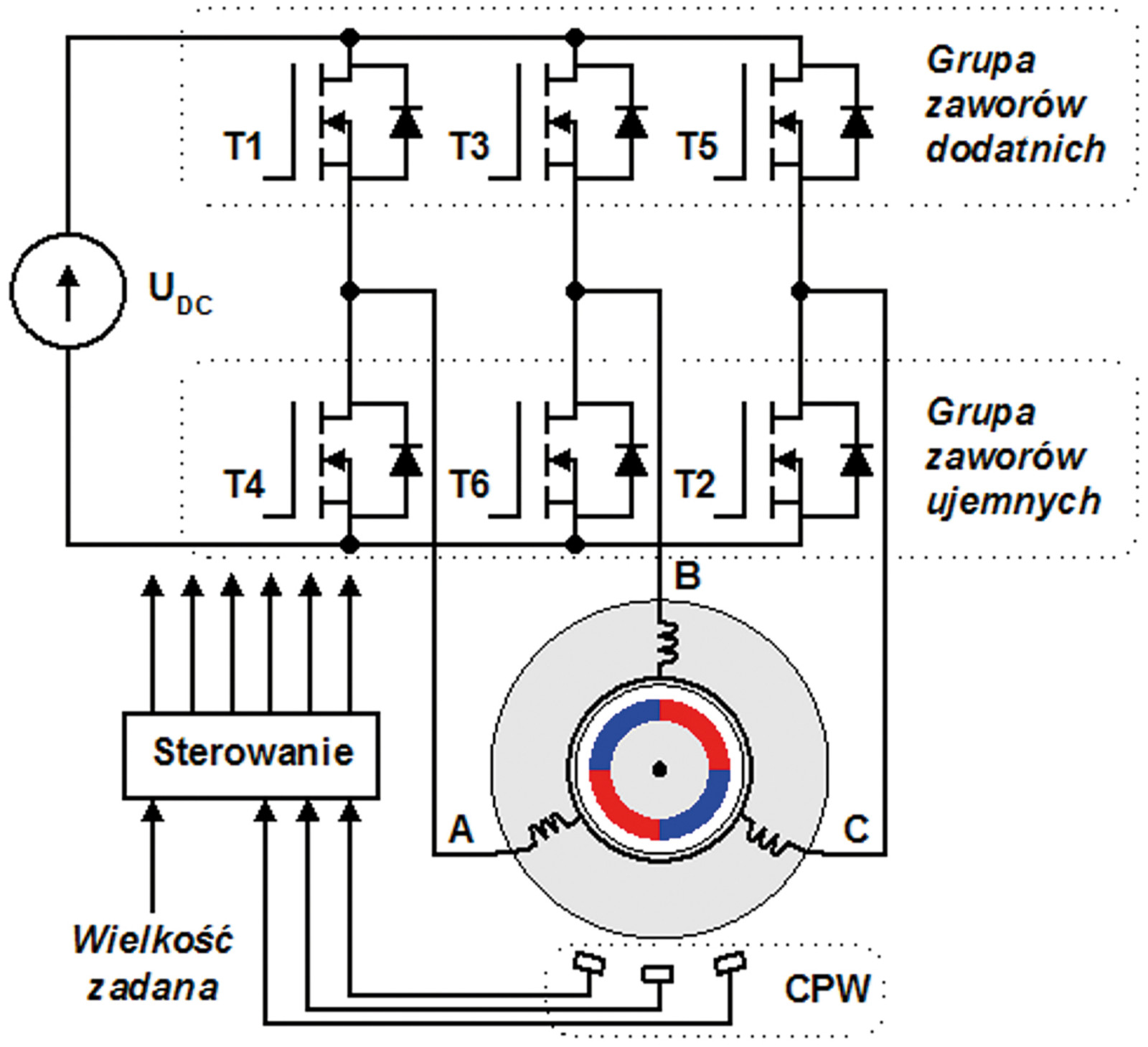
Jako „klasyczną metodę sterowania” określa się taką strategię, w której każdy tranzystor komutatora elektronicznego przewodzi prąd przez okres (kąt) 120º elektrycznych, komutacja faz następuje w równych odstępach 60º, natomiast informacja o aktualnej pozycji wirnika pochodzi z czujnika położenia wirnika (CPW). Ogólna sekwencja przełączeń zaworów komutatora jest identyczna dla wszystkich rozpatrywanych strategii sterowania [2, 4, 7, 11].
Poszczególne metody sterowania różnią się między sobą pod względem tego np., która grupa zaworów pełni rolę regulacyjną, jaki jest okres pełnienia tej funkcji oraz co jest wielkością regulowaną.
Kryteria podziału metod sterowania
Można wyróżnić kilka kryteriów podziału klasycznych metod sterowania silnikami BLDC. Ze względu na wielkość regulowaną strategie sterowania można podzielić na dwie kategorie. Pierwsza z nich to metody prądowe – wielkością regulowaną jest prąd po stronie DC przekształtnika lub prądy fazowe silnika. Strategie te oznacza się literą C. Drugą kategorię stanowią metody napięciowe, gdzie wielkością regulowaną jest napięcie silnika. Takie strategie oznaczane są literą V. Ze względu na okres (kąt) pełnienia funkcji regulacyjnej przez poszczególne zawory komutatora elektronicznego, klasyczne metody sterowania można podzielić również na dwa przypadki. W pierwszym, kąt pełnienia funkcji regulacyjnej przez jeden z tranzystorów wynosi 120º elektrycznych (te strategie oznacza się symbolem 120). W drugim przypadku każdy tranzystor pełni funkcję regulacyjną przez okres 60º elektrycznych – przez okres pozostałych 60º funkcję regulacyjną przejmuje zawór z grupy przeciwnej (te metody sterowania oznacza się symbolem 60). Ze względu na to, która grupa zaworów komutatora elektronicznego realizuje funkcję regulacyjną przez cały okres przewodzenia lub, w której jego części (pierwszej czy drugiej), klasyczne strategie sterowania można podzielić na trzy przypadki. Jeżeli funkcję regulacyjną pełni zawsze tranzystor grupy dodatniej lub jeśli funkcja ta jest realizowana przez pierwsze 60º okresu przewodzenia każdego tranzystora, wówczas metodę sterowania oznacza się symbolem Q+ (rzadziej Q1). Jeżeli funkcję regulacyjną pełni zawsze tranzystor grupy ujemnej, lub jeśli funkcja ta jest realizowana przez ostatnie 60º okresu przewodzenia każdego tranzystora, wówczas metodę sterowania oznacza się symbolem Q– (rzadziej Q6). Natomiast w wypadku, gdy funkcję regulacyjną pełnią jednocześnie oba przewodzące tranzystory komutatora elektronicznego, metodę sterowania określa się jako bipolarną (i najczęściej nie oznacza żadnym dodatkowym symbolem) [1, 3, 5, 7, 10].
Z uwagi na to, że idee sekwencji przełączeń zaworów komutatora elektronicznego dla strategii typu C oraz V są identyczne w dalszej części artykułu omówiono je na przykładzie prądowych metod sterowania.