




- procesor: Megawin MG32F103RBT6 w obudowie LQFP64,
- taktowanie: dwa rezonatory kwarcowe 12 MHz (rdzeإ„) i 32,768 kHz (RTC),
- multipleksowany, 4-cyfrowy, 7-segmentowy wyإ›wietlacz LED ze scalonym sterownikiem segmentأ³w TBD62083 i czterema kluczami P-MOSFET,
- dwa przyciski programowalne i przycisk RESET,
- trzy diody LED (2أ—GPIO, 1أ—wskaإ؛nik zasilania),
- potencjometr poإ‚ؤ…czony z wejإ›ciem ADC,
- wbudowany czujnik temperatury MCP9808T (Iآ²C),
- wbudowana pamiؤ™ؤ‡ EEPROM AT25128B (SPI),
- gniazdo baterii CR2032 (podtrzymanie zasilania RTC),
- wbudowany stabilizator LDO 3,3 V,
- zasilanie poprzez zإ‚ؤ…cze USB lub gniazdo إ›rubowe (4,8...5,3 V),
- zإ‚ؤ…cze debuggera MLink lub kompatybilnego,
- zإ‚ؤ…cza interfejsأ³w UART, SPI, Iآ²C, USB Device (gniazdo mini USB),
- dodatkowe zإ‚ؤ…cze udostؤ™pniajؤ…ce piny PA0...7,
- zworki konfiguracyjne (zasilanie, BOOT) i mostki lutownicze (SPI, Iآ²C).
Mikrokontrolery Megawin w piguإ‚ce
Mikrokontroler MG32F103RBT6 nieprzypadkowo przypomina swoim oznaczeniem niebywale popularny ukإ‚ad z rodziny STM32 o numerze STM32F103RBT6. W istocie jest to tzw. zamiennik pin-to-pin, zapewniajؤ…cy peإ‚nؤ… kompatybilnoإ›ؤ‡ funkcjonalnؤ… pod wzglؤ™dem rodzaju obudowy oraz ukإ‚adu wyprowadzeإ„ (zarأ³wno w zakresie zasilania, jak i linii GPIO oraz przypisania funkcji alternatywnych). Jak widaؤ‡, zamiennik firmy Megawin oferuje niemal wszystkie bloki peryferyjne (oprأ³cz interfejsأ³w CAN oraz SDIO), ktأ³re moإ¼na znaleإ؛ؤ‡ w kultowych procesorach od ST, a dodatkowo przewyإ¼sza pierwowzأ³r pod niektأ³rymi wzglؤ™dami (np. deklarowany przez producenta pobأ³r prؤ…du jest wyraإ؛nie niإ¼szy w trybie aktywnym: 100 خ¼A/MHz zamiast 292 خ¼A/MHz), nieznacznie lepszy jest takإ¼e parametr آ poboru energii w trybie Sleep. Niإ¼szy pobأ³r prؤ…du jest widoczny rأ³wnieإ¼ w obszarze domeny backup (rejestry z podtrzymaniem bateryjnym i RTC), zasilanej za poإ›rednictwem linii VBAT. Co ciekawe, producent zastosowaإ‚ dodatkowo dwa komparatory oraz unikalny sterownik macierzy multipleksowanych diod LED, ktأ³ry – przy uإ¼yciu zaledwie 8 linii – jest w stanie wysterowaؤ‡ aإ¼â€…56 diod elektroluminescencyjnych. Takiego peryferium prأ³إ¼no szukaؤ‡ w nie tylko w oryginalnych rozwiؤ…zaniach ST, ale takإ¼e dziesiؤ…tkach innych rodzin mikrokontrolerأ³w.
Wspomniane cechy – w poإ‚ؤ…czeniu z kilkukrotnie niإ¼szؤ… cenؤ… (zarأ³wno detalicznؤ…, jak i hurtowؤ…) – sprawiajؤ…, إ¼e mikrokontrolery Megawin z rdzeniem ARM Corex-M3 sؤ… niezwykle ciekawؤ… alternatywؤ… zarأ³wno dla zawodowych konstruktorأ³w urzؤ…dzeإ„ elektronicznych, jak i dla amatorأ³w elektroniki. Dlatego wإ‚aإ›nie na إ‚amach â€Elektroniki Praktycznej†– juإ¼ w numerze 05/2024 – startujemy z (wszystko na to wskazuje) pierwszym na إ›wiecie kursem programowania procesorأ³w ARM marki Megawin. Aby uإ‚atwiؤ‡ naszym Czytelnikom rozpoczؤ™cie pracy z tymi interesujؤ…cymi ukإ‚adami, w tym wydaniu EP publikujemy opis zestawu ewaluacyjnego, ktأ³ry umoإ¼liwi realizacjؤ™ zarأ³wno zadaإ„ kursowych, jak i samodzielnych eksperymentأ³w z wiؤ™kszoإ›ciؤ… najwaإ¼niejszych peryferiأ³w wbudowanych w strukturؤ™ ukإ‚adu MG32F103RBT6.
Budowa ukإ‚adu
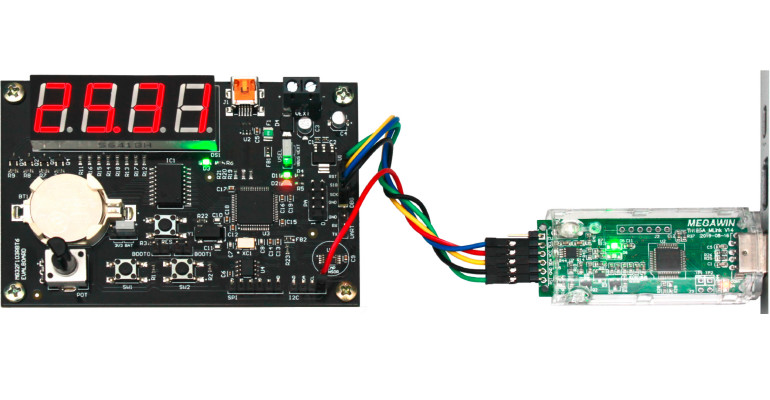
Zdecydowana wiؤ™kszoإ›ؤ‡ linii portأ³w mikrokontrolera (U3) zostaإ‚a uإ¼yta do obsإ‚ugi elementأ³w dostؤ™pnych na pإ‚ytce, zaإ› dodatkowo osiem najmإ‚odszych linii portu A (o numerach PA0...PA7) wyprowadzono na zإ‚ؤ…cze typu goldpin (PA). Caإ‚oإ›ؤ‡ ukإ‚adu jest zasilana napiؤ™ciem 3,3 V, dostarczonym przez stabilizator LDO (U1) typu LD1117AS33 w obudowie SOT-223. إ¹rأ³dإ‚em napiؤ™cia wejإ›ciowego regulatora moإ¼e byؤ‡ zإ‚ؤ…cze إ›rubowe VEXT (w tej roli popularny terminal typu ARK o rastrze 5 mm) albo port USB, w zaleإ¼noإ›ci od ustawienia zworki VSEL. Obecnoإ›ؤ‡ napiؤ™cia zasilania sygnalizuje إ›wiecenie zielonej diody LED D3.
Sam port USB jest chroniony za pomocؤ… scalonego ukإ‚adu zabezpieczajؤ…cego przed wyإ‚adowaniami ESD (USBLC6-2SC6, U2), integrujؤ…cego w sobie zestaw szybkich diod poإ‚ؤ…czonych z liniami pary rأ³إ¼nicowej (D+/D–) oraz dodatkowؤ…, piؤ…tؤ… diodؤ™ Zenera, podإ‚ؤ…czonؤ… do szyny VBUS. Wyprowadzenie VBUS gniazda mini USB (J1) poإ‚ؤ…czone zostaإ‚o z resztؤ… ukإ‚adu przez dإ‚awik ferrytowy (FB1) oraz 100-miliamperowy bezpiecznik PTC (F1).
W ukإ‚adzie przewidziano moإ¼liwoإ›ؤ‡ zasilania domeny backup mikrokontrolera na jeden z dwأ³ch sposobأ³w. Podczas testowania projektأ³w niekorzystajؤ…cych z funkcjonalnoإ›ci rejestrأ³w podtrzymywanych bateryjnie ani z zegara czasu rzeczywistego RTC uإ¼ytkownik moإ¼e pominؤ…ؤ‡ instalacjؤ™ baterii CR2032 w przeznaczonej dla niej podstawce (BT1) i doprowadziؤ‡ zasilanie do linii VBAT mikrokontrolera bezpoإ›rednio z gإ‚أ³wnej szyny 3,3 V. W przeciwnym razie naleإ¼y przestawiؤ‡ zworkؤ™ VBATSEL na pozycjؤ™ VBAT, co umoإ¼liwi testowanie ww. funkcjonalnoإ›ci w warunkach rzeczywistych (tj. po odciؤ™ciu gإ‚أ³wnego napiؤ™cia zasilajؤ…cego).
Interfejs HMI tworzy zestaw dwأ³ch przyciskأ³w podإ‚ؤ…czonych do linii GPIO mikrokontrolera, dwie diody LED (takإ¼e wspأ³إ‚pracujؤ…ce bezpoإ›rednio z MCU) oraz siedmiosegmentowy, czteropozycyjny wyإ›wietlacz LED ze wspأ³lnؤ… anodؤ… (DS1). Od doإ‚u poszczegأ³lne segmenty (katody) sؤ… przeإ‚ؤ…czane za pomocؤ… drivera typu TBD62083 (IC1), zإ‚oإ¼onego z tranzystorأ³w N-MOSFET (Q1...Q4), pracujؤ…cych w ukإ‚adzie otwartego drenu i wyposaإ¼onych w zestaw kilku wbudowanych elementأ³w pasywnych oraz diod zabezpieczajؤ…cych. Od strony wyإ¼szego potencjaإ‚u, tj. w obwodach wspأ³lnych anod, zastosowano natomiast proste klucze tranzystorowe na bazie popularnych MOSFET-أ³w maإ‚ej mocy typu BSS84.
Aby umoإ¼liwiؤ‡ uإ¼ytkownikom pإ‚ytki ewaluacyjnej إ‚atwe przetestowanie funkcjonalnoإ›ci interfejsأ³w SPI oraz Iآ²C, bez koniecznoإ›ci doإ‚ؤ…czania zewnؤ™trznych moduإ‚أ³w, na pإ‚ytce zamontowano dwa popularne i niedrogie ukإ‚ady scalone. U5 to cyfrowy czujnik temperatury typu MCP9808T, wyposaإ¼ony w interfejs Iآ²C, natomiast U4 to pamiؤ™ؤ‡ EEPROM typu AT25128B, komunikujؤ…ca siؤ™ z procesorem za poإ›rednictwem klasycznego, czteroliniowego إ‚ؤ…cza SPI, pracujؤ…cego w trybie full duplex. Pracؤ™ przetwornika analogowo-cyfrowego moإ¼na natomiast sprawdziؤ‡ potencjometrem POT, poإ‚ؤ…czonym z jednؤ… z linii mikrokontrolera MG32F103RBT6 przeznaczonych do pracy w trybie analogowym.
Przypisanie funkcji do linii GPIO
Aby uإ‚atwiؤ‡ Czytelnikom pisanie programأ³w na prezentowanؤ… w artykule pإ‚ytkؤ™ ewaluacyjnؤ…, zebrano komplet informacji niezbؤ™dnych do prawidإ‚owego skonfigurowania linii GPIO. W przypadku interfejsأ³w szeregowych (SPI, Iآ²C, UART, USB) z oczywistych przyczyn nie podano domyإ›lnych stanأ³w logicznych – sؤ… one wszak narzucone przez odpowiednie bloki peryferyjne.آ
Uwagi dotyczؤ…ce parametrأ³w elektrycznych GPIO
Warto zwrأ³ciؤ‡ uwagؤ™ na istotne rأ³إ¼nice pomiؤ™dzy parametrami elektrycznymi linii portأ³w GPIO mikrokontrolerأ³w MG32F103 oraz ich â€pierwowzoruâ€, czyli ukإ‚adأ³w z rodziny STM32F103. O ile te drugie oferujؤ… caإ‚kiem sporؤ… liczbؤ™ wyprowadzeإ„ tolerujؤ…cych pracؤ™ przy napiؤ™ciu 5 V, to ukإ‚ady marki Megawin takiej moإ¼liwoإ›ci nie dajؤ…. Z tego teإ¼ wzglؤ™du zdecydowano siؤ™ na podإ‚ؤ…czenie إ؛rأ³deإ‚ kluczy tranzystorowych Q1...Q4 do wyjإ›cia stabilizatora LDO, a nie bezpoإ›rednio do gإ‚أ³wnego napiؤ™cia wejإ›ciowego 5 V. Choؤ‡ taki zabieg moإ¼e wydawaؤ‡ siؤ™ maإ‚o atrakcyjny pod wzglؤ™dem termicznym, to znakomicie upraszcza konstrukcjؤ™ ukإ‚adu, redukuje bowiem koniecznoإ›ؤ‡ stosowania dodatkowych przesuwnikأ³w poziomu (bezpoإ›rednie wysterowanie bramek tranzystorأ³w podciؤ…gniؤ™tych do napiؤ™cia 5 V byإ‚oby wszak niemoإ¼liwe). Z drugiej strony, przy zastosowanych komponentach teoretyczny wzrost temperatury struktury krzemowej LDO przy peإ‚nym wysterowaniu wyإ›wietlacza (8 segmentأ³w jednoczeإ›nie na wszystkich czterech pozycjach) wynosi okoإ‚o 10آ°C, a zatem moإ¼na go uznaؤ‡ za efekt pomijalny w praktycznych zastosowaniach.
Sإ‚owa komentarza wymaga takإ¼e obecnoإ›ؤ‡ drivera typu low-side (IC1). W klasycznych ukإ‚adach sterowania multipleksowanych wyإ›wietlaczy LED segmenty czؤ™sto sؤ… sterowane bezpoإ›rednio z linii mikrokontrolera, zaإ› klucze znajdujؤ… siؤ™ jedynie po stronie wyprowadzeإ„ wspأ³lnych (w tym przypadku – anod). Istotnie, przy zastosowaniu mikrokontrolera STM32F103 byإ‚oby to moإ¼liwe, gdyإ¼ caإ‚kowity prؤ…d maksymalny na liniach zasilania moإ¼e dochodziؤ‡ nawet do 150 mA. W przypadku ukإ‚adu marki Megawin limit ten jest przeszإ‚o dwukrotnie niإ¼szy i wynosi 60 mA – wartoإ›ؤ‡ zbliإ¼a siؤ™ zatem niebezpiecznie do sumarycznego prؤ…du oإ›miu wإ‚ؤ…czonych jednoczeإ›nie segmentأ³w. Stosujؤ…c ukإ‚ady Megawin (podobnie zresztؤ…, jak i inne zamienniki mikrokontrolerأ³w), naleإ¼y zatem przestudiowaؤ‡ noty katalogowe oraz uwzglؤ™dniؤ‡ obecnoإ›ؤ‡ ewentualnych rأ³إ¼nic pomiؤ™dzy parametrami poszczegأ³lnych ukإ‚adأ³w. Tak czy inaczej, jeإ¼eli urzؤ…dzenie zaprojektowane zostaإ‚o prawidإ‚owo (tj. z zachowaniem odpowiednich marginesأ³w bezpieczeإ„stwa), zamiana STM32 na MG32 powinna przebiegaؤ‡ bez wiؤ™kszych problemأ³w (rzecz jasna, mأ³wimy tutaj wyإ‚ؤ…cznie o kwestiach sprzؤ™towych, gdyإ¼ rأ³إ¼nice w budowie blokأ³w peryferyjnych oraz procedurach ich konfiguracji bؤ™dziemy omawiaؤ‡ dokإ‚adniej na إ‚amach naszego kursu).



















