
- Regulacja jasności jednej taśmy LED poprzez zasilanie jej przebiegiem PWM.
- Przystosowanie do napięcia stałego 12 V lub 24 V.
- Komunikacja za pomocą podczerwieni.
- Jasność zadawana enkoderem w nadajniku.
- Nadajnik zasilany bateryjnie.
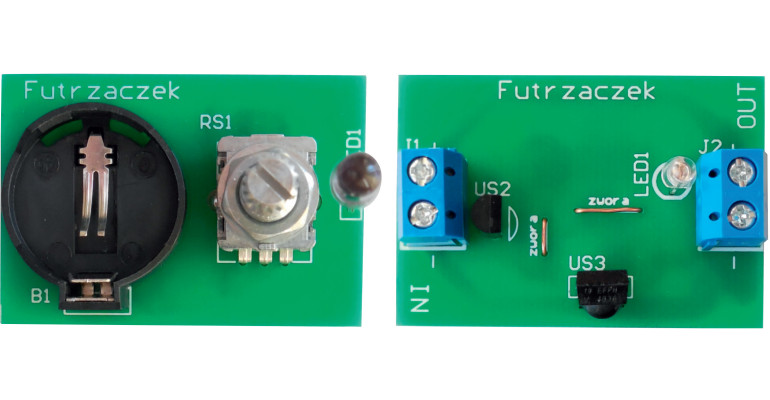
- Niewielkie wymiary nadajnika i odbiornika (płytki o wymiarach 31 mm×45 mm).
Kompletny sterownik taśmy składa się z dwóch urządzeń: nadajnika i odbiornika.
Nadajnik
Schemat nadajnika zdalnego sterowania, tzw. pilota. W pilocie znajduje się mikrokontroler ATtiny13V. Sufiks „V” oznacza rozszerzony zakres napięć zasilających, od 1,8 V do 5,5 V. Dzięki temu, możliwe jest zasilanie go z pojedynczej baterii CR2032 o napięciu 3 V. Dzięki temu, pilot może być lekki i niewielki.
Dioda nadawcza IR wymaga impulsów prądu o znacznym natężeniu. Sygnał wychodzący z mikrokontrolera wymaga wzmocnienia za pośrednictwem tranzystora T1. Rezystor R2 ogranicza prąd jego bazy, a kondensator C7 przyśpiesza jej przeładowywanie, czyli zatykanie i nasycanie tranzystora. Prąd bazy tego tranzystora to ok. 2 mA, zaś prąd diody nadawczej to ok. 70 mA. Wynika z tego, że wzmocnienie prądowe T1 nie powinno być mniejsze od 100, aby ten prawidłowo wchodził w stan nasycenia. Ten warunek spełnia każdy BC807, bez konieczności wyszczególniania grupy.
Wszystkie wyprowadzenia enkodera zostały podłączone do mikrokontrolera. W typowym zastosowaniu, elektroda wspólna podłączana jest do masy, zaś pozostałe do dodatniego bieguna zasilania, za pośrednictwem rezystorów podciągających.
Pomimo oczywistej prostoty, tutaj taka realizacja jest niemożliwa do przyjęcia: jeżeli któryś ze styków enkodera ustawi się w takim położeniu, że zapewni długotrwały przepływ prądu przez rezystor podciągający, wówczas bateria ulegnie rozładowaniu w szybkim tempie, pomimo zredukowania poboru energii przez sam mikrokontroler.
Algorytm pracy zastosowany w tym układzie sprowadza się do okresowego (co 250 ms) wyprowadzania mikrokontrolera ze stanu głębokiego uśpienia i sprawdzania, czy zmienił się stan któregokolwiek ze styków A, B, lub SW. Po wybudzeniu, wyprowadzenie wspólne (COM) jest ściągane do masy, przez co odczyt poziomu logicznego z pozostałych wejść, mających wewnętrzne rezystory podciągające, jest możliwy. Jeżeli zmiany nie ma, wyprowadzeniu COM zostaje nadany logiczny stan „1” i mikrokontroler przechodzi do trybu energooszczędnego. W razie wystąpienia zmiany, ponowne uśpienie zostaje odroczone na ok. 0,5 s od detekcji ostatniego ruchu na stykach. W tym czasie, układ znajduje się w stanie aktywnym i natychmiastowo reaguje na polecenia użytkownika.
Takie działanie jest możliwe dzięki zastosowaniu przerwania od układu watchdog, który pracuje z oddzielnym oscylatorem o niskiej częstotliwości. Generuje on okresowo przerwania, które uruchamiają uśpiony rdzeń.
Wymienione czynności pozwoliły na zredukowanie poboru prądu do wartości średniej oscylującej wokół 5 μA. Zakładając, że typowa bateria CR2032 ma pojemność 200 mAh, powinna ona wystarczyć na ponad 4 lata pracy takiego pilota. Pobór prądu w stanie aktywnym (po wybudzeniu) wzrasta do ok. 600 μA, zaś w czasie nadawania wynosi ok. 20 mA.
Sposób, w którym przebiega komunikacja w podczerwieni, opiera się na standardzie RC5 w jego typowym wydaniu. Nie zachodzi tutaj potrzeba specjalnego kodowania informacji bądź przesyłania długich ciągów danych, zatem ten prosty i doskonale znany standard powinien sprawdzić się bez zarzutu.
Takie rozwiązanie pozwala na sterowanie jasnością nie tylko za pośrednictwem opisanego tu pilota, lecz również każdego uniwersalnego, który jest wyposażony w diodę emitującą światło o długości fali 950 nm lub zbliżonej. Adres tego urządzenia został na sztywno ustawiony na 11 – niewykorzystany, zatem nie powinno być konfliktów z innymi urządzeniami RTV w pomieszczeniu. Bit „toggle” nie jest sprawdzany przez odbiornik.
Do wytwarzania fali prostokątnej o częstotliwości 36 kHz został wykorzystany tryb CTC licznika Timer0, który jest taktowany bezpośrednio z zegara rdzenia. Ponieważ bity zabezpieczające należy pozostawić w ustawieniu fabrycznym, owa częstotliwość wynosi 1,2 MHz. Ustawienie wartości rejestru OCR0A = 15 zaowocowało generacją sygnału o częstotliwości ok. 36,4 kHz. Niewielkie odstępstwo (rzędu 1%) nie szkodzi w stosowaniu scalonego odbiornika na częstotliwość 36 kHz, jak użyty tutaj TSOP4836, ponieważ filtr częstotliwości nośnej w nim zawarty nie jest tak bardzo selektywny.
Dodatkowy rezystor R1, podciągający wyprowadzenie zerowania do dodatniego bieguna baterii, został dodany w celu uniknięcia nieprawidłowości w działaniu układu, wywołanych przez upływności montażowe oraz gromadzące się ładunki elektrostatyczne. Nie ma on wpływu na pobór prądu przez układ.
Obsługa pilota polega na przekręcaniu osi enkodera w prawo (zwiększenie jasności) bądź w lewo (zmniejszanie jasności) oraz wciśnięcie jej (wyłączenie taśmy LED).