
W części odbiorczej urządzenia zainstalowano przełącznik dla wyboru trybu pracy. Czyli, czy układ ma reagować na dźwięki czy na gesty. Robot taki może realizować poważne zadania lub może być ciekawą zabawką, jeśli będzie podążał za Tobą np. w trakcie jogi lub innych ćwiczeń. Można również robota skonstruować tak, aby reagował na różne dźwięki w jego otoczeniu.
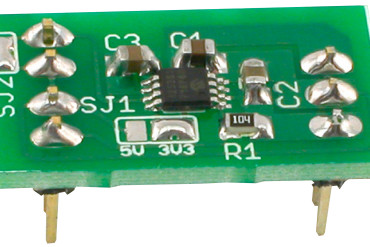
W schemacie wyróżnimy dwie oddzielne sekcje dla obu trybów pracy. Obydwie sekcje mają też oddzielne czujniki. W sekcji, która ma reagować na klaśnięcia czujnikiem jest mikrofon elektretowy. W sekcji gestów jako czujnik ruchu zastosowano akcelerometr.
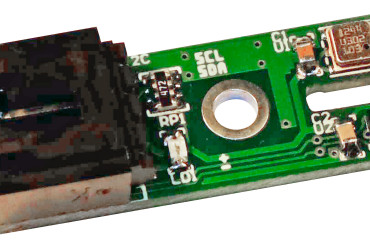
W sekcji reagującej na dźwięki wykonano swoisty obwód przełączający, który jest aktywowany wtedy, gdy układ rozpozna dźwięk odpowiadający klaśnięciu w dłonie. Obwód składa się z czujnika dźwięku, którym jak powiedziano jest mikrofon. Kolejnymi podzespołami jest timer 555 oraz licznik dekadowy. W sekcji sterowanej gestami oprócz części odbiorczej dochodzi nadajnik. Ruch wykrywany jest przez akcelerometr, który współpracuje z mikrokontrolerem ATmega328P (MCU). Na płytce transmitera jest także koder sygnału oraz bezprzewodowy nadajnik radiowy.
Dalszy opis działania podporządkowany jest ogólnej charakterystyce układu, w której są opisane wspomniane sekcje. Sekcja „clap control” zawiera tylko odbiornik, podczas gdy w sekcji „gestów” mamy odbiornik i nadajnik sygnałów. Ta płytka jest fizycznie ulokowana w robocie i może być ukryta jeśli konstrukcja mechaniczna robota na to pozwala.