Autorski prototyp został przedstawiony na fotografii 1 - powyżej.
Rama drona QAV250 jest niewielkich rozmiarów, ale wymaga silnika o wysokich obrotach i napięciu znamionowym kV do latania z dużą prędkością i elastycznością ruchu. Potrzebujemy mniejszego rozmiaru kontrolera lotu i śmigła, które zmieszczą się w ramie drona. Silnik o napięciu znamionowym wyższym niż 2200 kV i śmigła o rozmiarze pomiędzy 12,7 a 15,2 cm (5 do 6 cali) spełniłyby swoje zadanie. Ale kiedy silniki 'A2212' 2200 kV były używane ze śmigłami 12,7 cm, nie wytwarzały wystarczającej siły ciągu, aby latać wystarczająco szybko. Dlatego zastosowano większe śmigła '6045' o rozmiarze 15,2 cm i skoku 10,2 cm (6 cali z 4-calowym skokiem).
Montaż
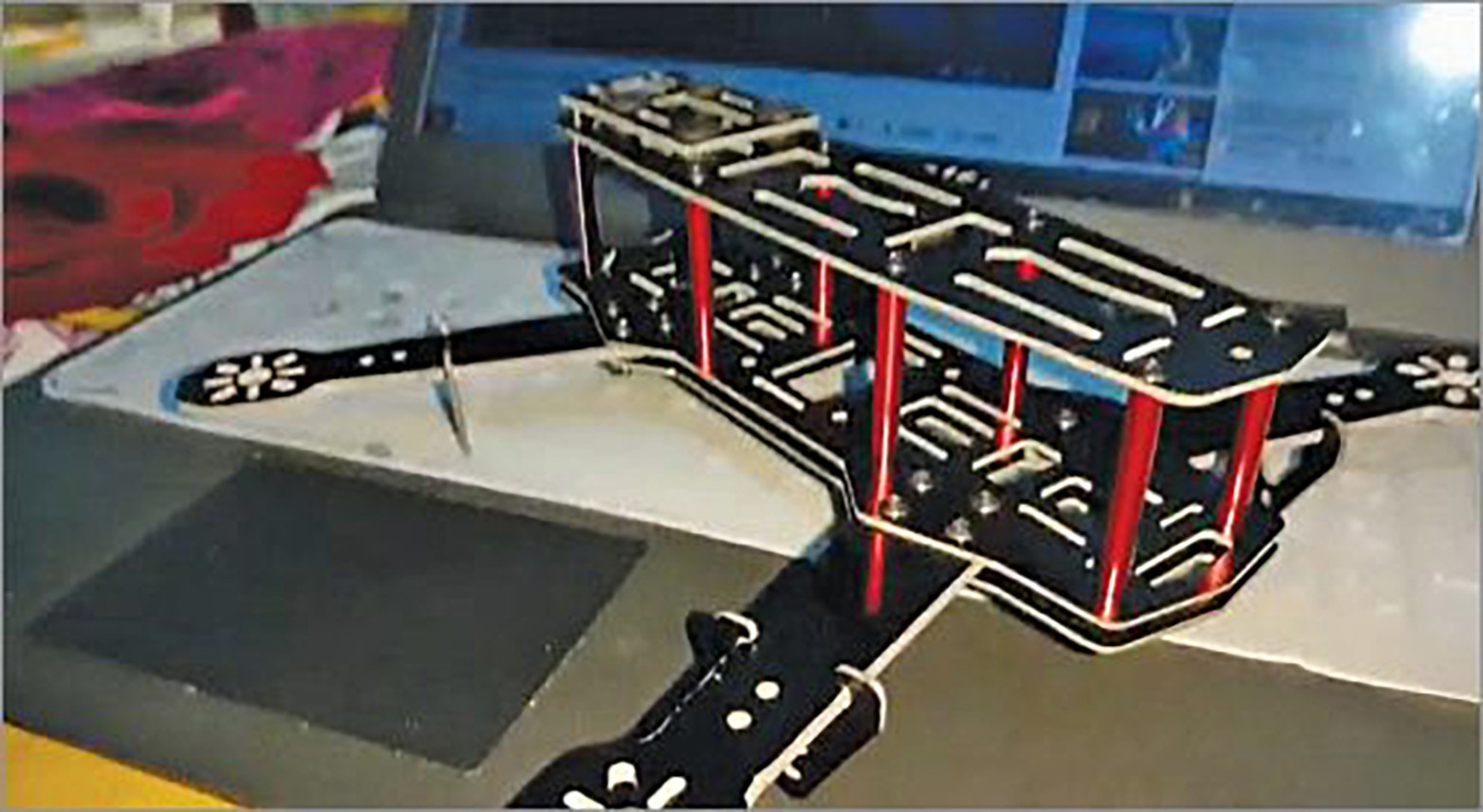
Najpierw należy zmontować ramę drona. Rama drona QAV250 ma dwie płyty bazowe, cztery ramiona dla silników, jedną płytę górną i cztery podwozia. Umieść wszystkie cztery ramiona pomiędzy dwoma płytami bazowymi i przykręć je. Dodaj podwozia na czterech ramionach, a następnie przymocuj górną płytę do płyty bazowej. Rama drona jest teraz gotowa do wyposażenia w kontroler elektroniczny i inne komponenty na płycie bazowej. Zmontowana rama jest pokazana na fotografii 2.
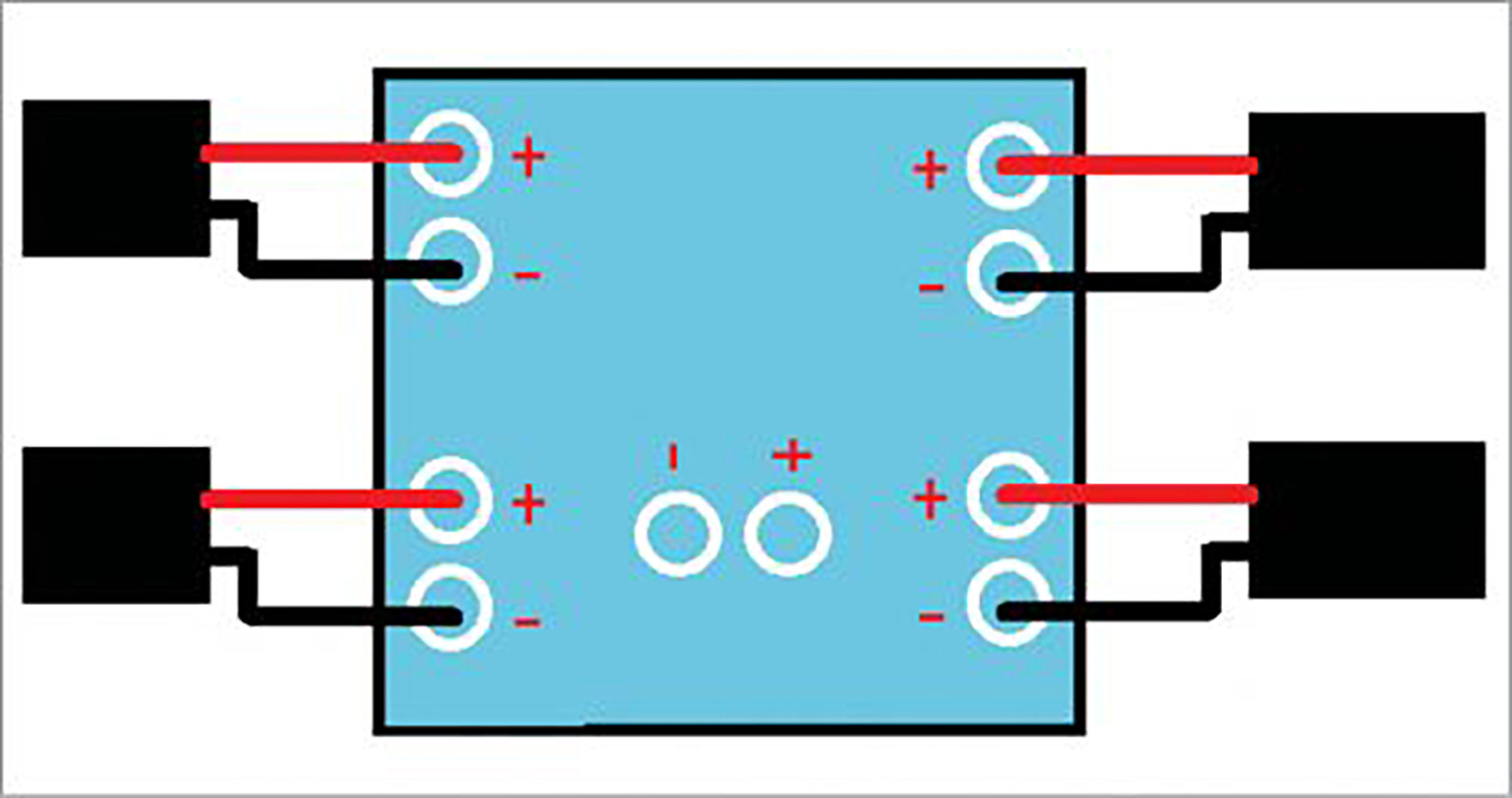
Podłącz przewody ESC do płytki zasilającej wraz z wtyczką XT60, jak pokazano na rysunku 3. Umieść płytkę zasilania na środku ramy QAV250 i zamocuj ją. Następnie zamocuj ESC na każdym ramieniu ramy, jak pokazano na fotografii 4. Przykręć wszystkie silniki A2212 do ramy drona.

Połącz trzy przewody z każdego ESC z trzema przewodami każdego silnika. Następnie podłącz trzy przewody z każdego ESC do kontrolera lotu CC3D z oznaczeniami +, -, i S na płytce kontrolera lotu. Czarny przewód ESC jest masą (GND), która powinna być podłączona do '-', czerwony przewód jest dodatni i powinien być podłączony do '+', a żółty przewód jest sygnałem PWM, który może być podłączony do 'S' kontrolera lotu, odpowiednio (patrz rysunek 5). Następnie należy podłączyć odbiornik radiowy do kontrolera lotu CC3D, jak pokazano na rysunku 5.
Przygotowanie kontrolera lotu
Kontroler lotu można zaprogramować za pomocą oprogramowania OpenPilot Ground Control Station (GCS) lub LibrePilot GCS. Można pobrać i używać dowolnego z nich. W tym artykule, podczas testów, użyto LibrePilot.
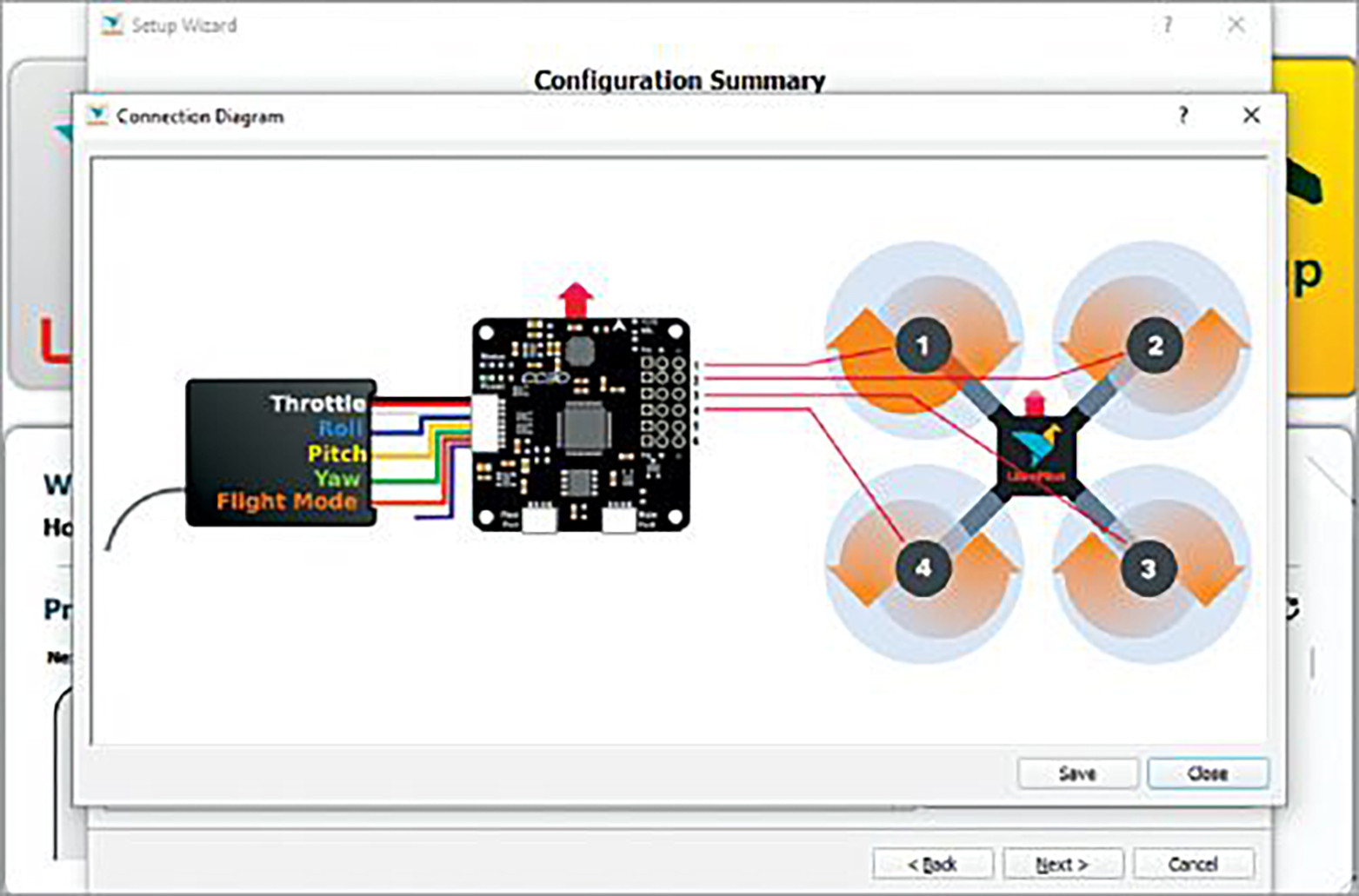
Otwórz oprogramowanie LibrePilot i podłącz kontroler lotu do komputera przez USB. Z programu LibrePilot wybierz Kreator Konfiguracji Pojazdu (patrz rysunek 6). Z szeregu opcji wybierz aktualizację firmware klikając na Upgrade, a następnie poczekaj aż firmware załaduje się do kontrolera lotu. Pojawi się okno (patrz rysunek 7), w którym można dokonać kalibracji ACC.


Umieść kontroler lotu na płaskiej powierzchni i upewnij się, że jest on skierowany w stronę przedniego silnika. Skalibruj akcelerometr i silnik ESC zgodnie z podaną instrukcją. Odłącz baterię od rozdzielnicy zasilania. Następnie kliknij na start i poczekaj na dźwięk drgań/brzęczeń z silnika. Powtórz procedurę jeszcze raz. ESC jest teraz skalibrowany, jak pokazano na rysunku 8.

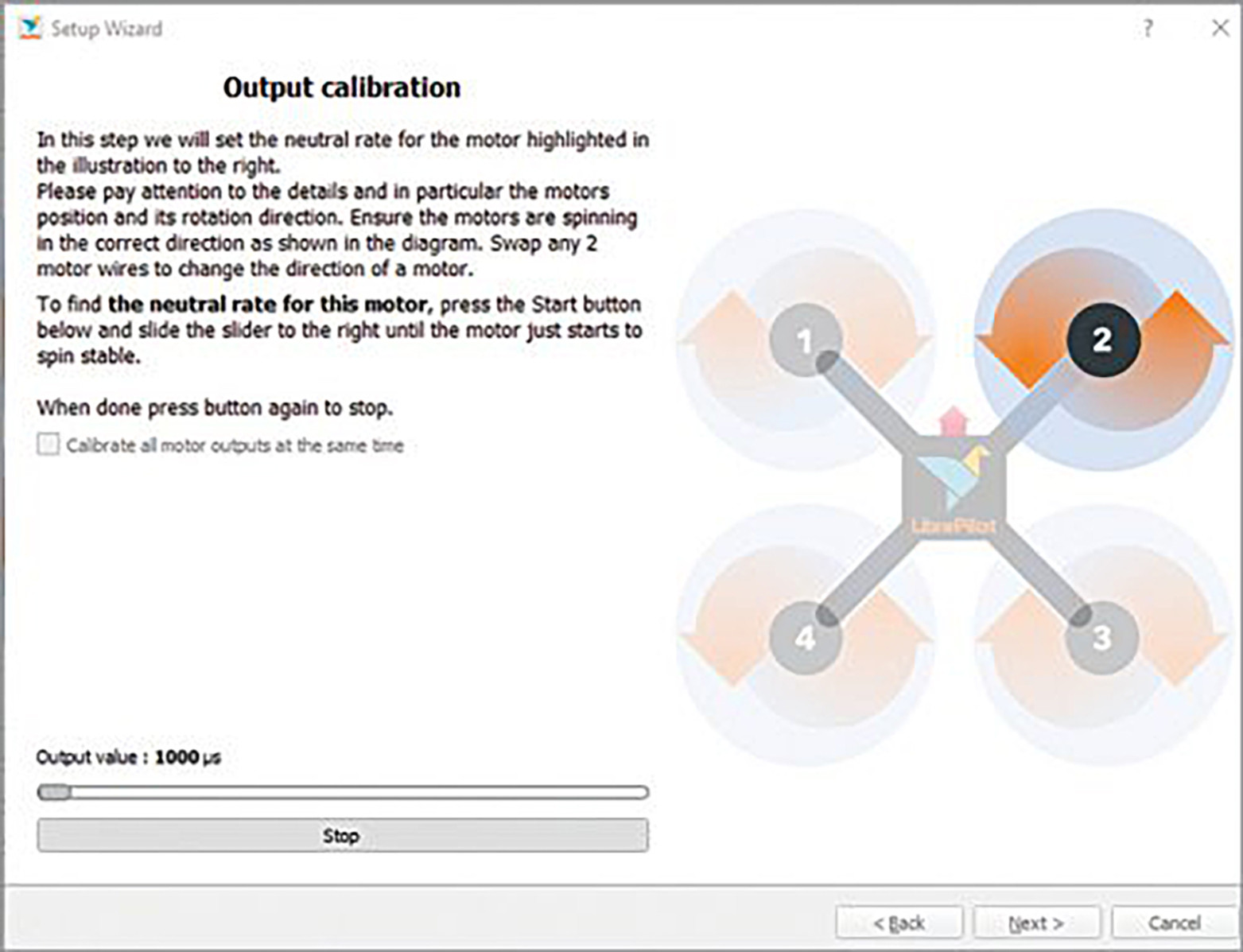
Następnie przechodzimy do kalibracji wyjścia, jak pokazano na rysunku 9. Tutaj pokazany jest kierunek obrotów silnika. Kliknij na start, a następnie przesuwaj suwaki, aż silnik zacznie się płynnie poruszać. Następnie kliknij Stop. Upewnij się, że kierunek obrotów silnika jest zgodny z tym, który jest widoczny na ekranie programu LibrePilot. Jeśli nie, zamień miejscami dwa dowolne przewody silnika z ESC, aby zmienić kierunek obrotów. Powtórz procedurę dla wszystkich silników i zapisz ustawienia.
Następnie zostaniesz przeniesiony do kreatora ustawień odbiornika nadajnika. Upewnij się, że pilot nadajnika jest włączony, odbiornik jest podłączony, a akumulator LiPo jest podłączony do rozdzielnicy zasilania. Postępuj zgodnie z instrukcjami podawanymi przez oprogramowanie.
Przesuń drążki pilota w sposób pokazany w GUI, a następnie umieść wszystkie drążki na środku. Następnie przesuń wszystkie drążki do pozycji maksymalnych w obu kierunkach i zapisz ustawienia. Po tym należy zdefiniować proces uzbrajania kontrolera lotu. W tym celu przejdź do ustawień uzbrajania i wybierz opcje uzbrajania.
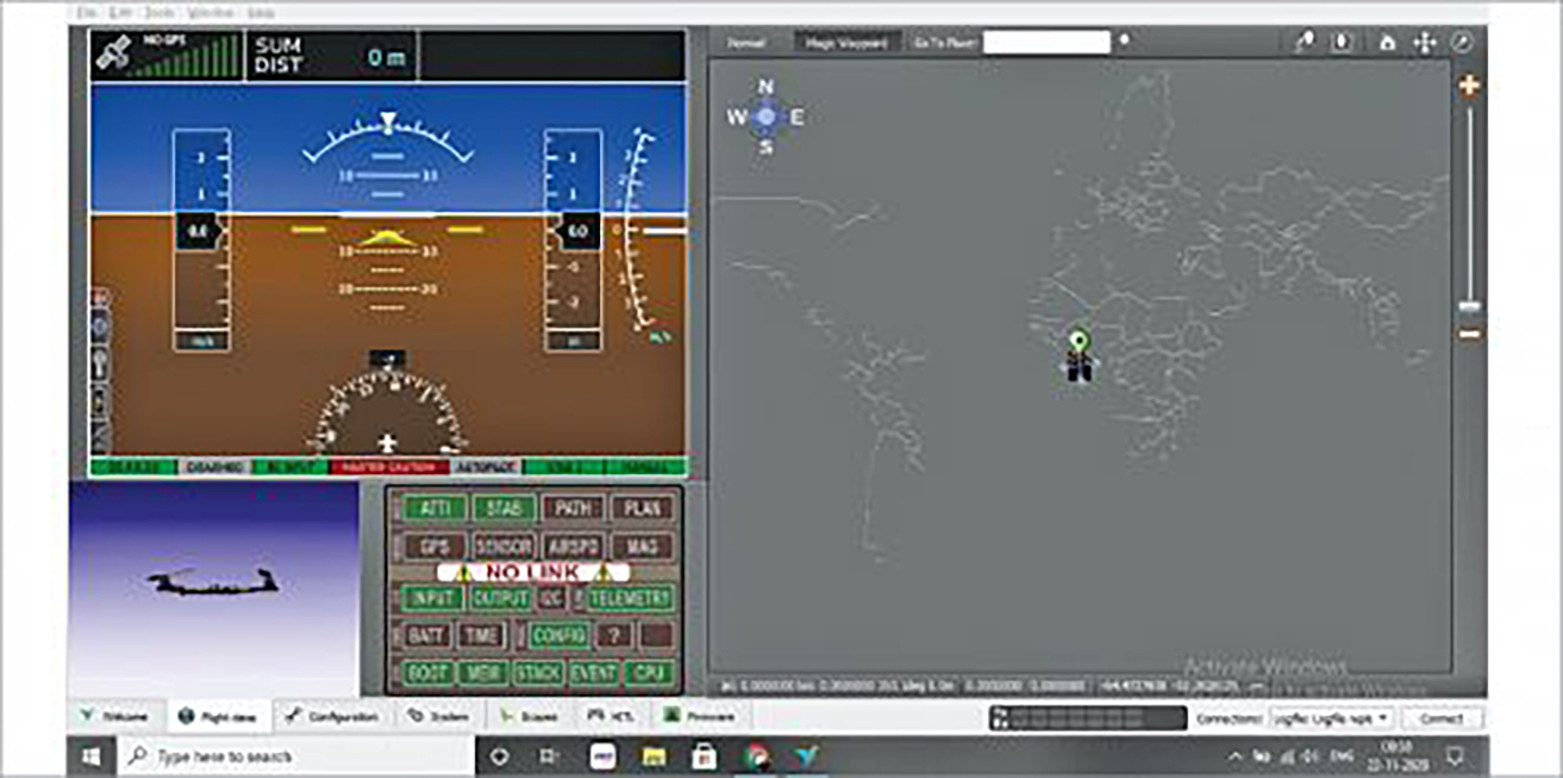
Następnie dodaj kamerę FPV do drona. Kamera FPV posiada trzy przewody: żółty, czerwony i czarny. Okno danych lotu pokazuje ruch drona (patrz rysunek 10).
Podłącz czerwony i czarny przewód do zasilania, zgodnie z wymaganiami Twojej kamery. W prototypie wykorzystano moduł kamery Raspberry Pi, ponieważ był on już dostępny, co pokazano na fotografii 11.

Przygotowanie systemu komunikatów publicznych
Do tworzenia i nagrywania komunikatów można wykorzystać AIY Voice Bonnet. Jest on dostarczany z kartą SD, na której jest fabrycznie wgrany obraz systemu AIY Raspbian. Jeśli jednak nie masz takiej karty, możesz ją przygotować samodzielnie wgrywając obraz systemu.
Trudna część uzbrajania
Zauważono, że kontroler lotu CC3D nie uzbroił się, gdy drążek odchylający został przesunięty w prawo. Nawet po wypróbowaniu różnych ustawień drążków, takich jak pochylenie w prawo i odchylenie w lewo, nic nie uzbroiło kontrolera lotu. Szybkie wyszukiwanie w Internecie wykazało, że wiele osób boryka się z tym samym problemem. Zmiana wartości odbiornika i dostrojenie pilota radiowego nie pomaga. Ale uzbrajanie można łatwo wykonać, korzystając z dodatkowych kanałów na pilocie. Autor wykorzystał szósty kanał do uzbrojenia.
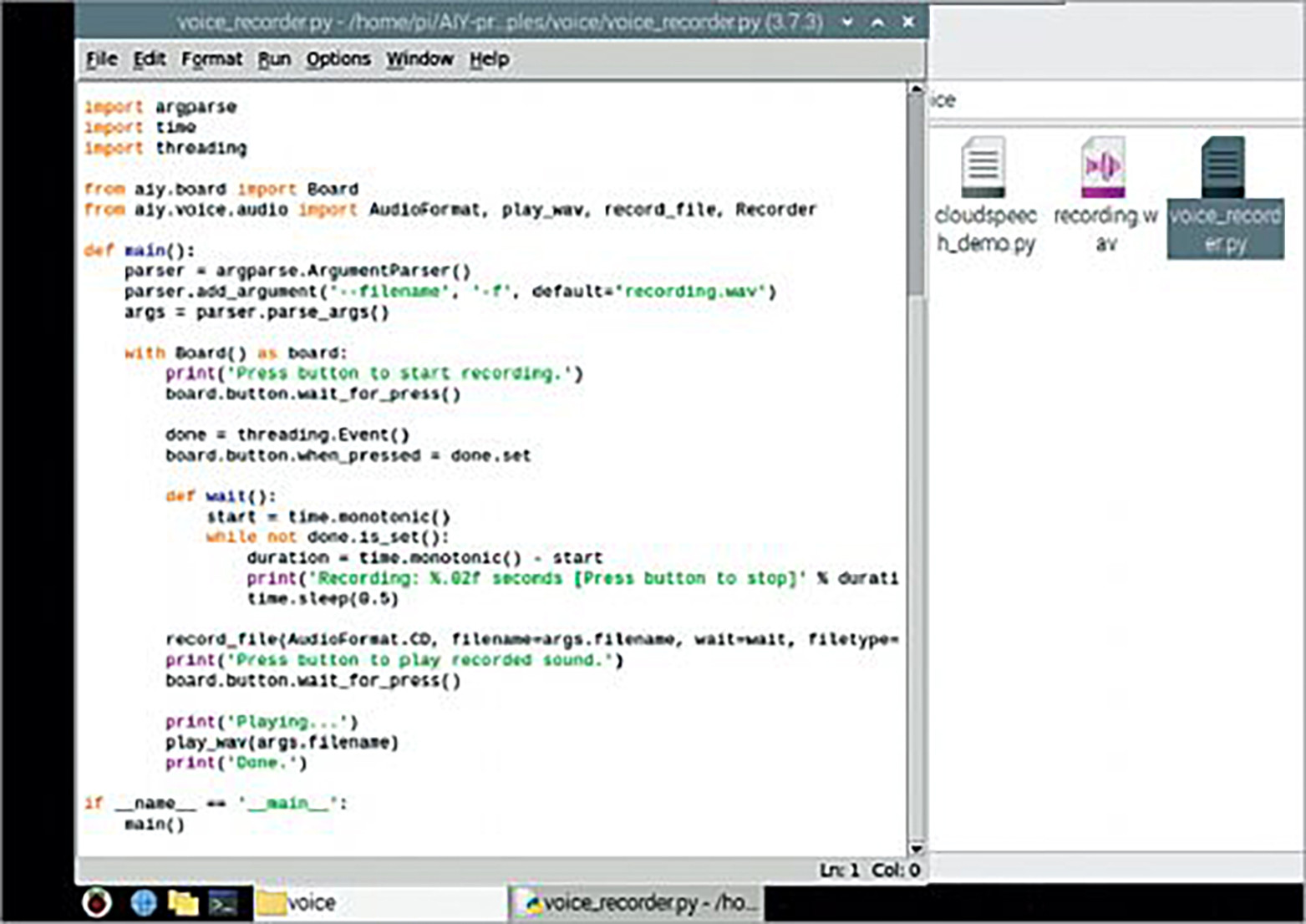
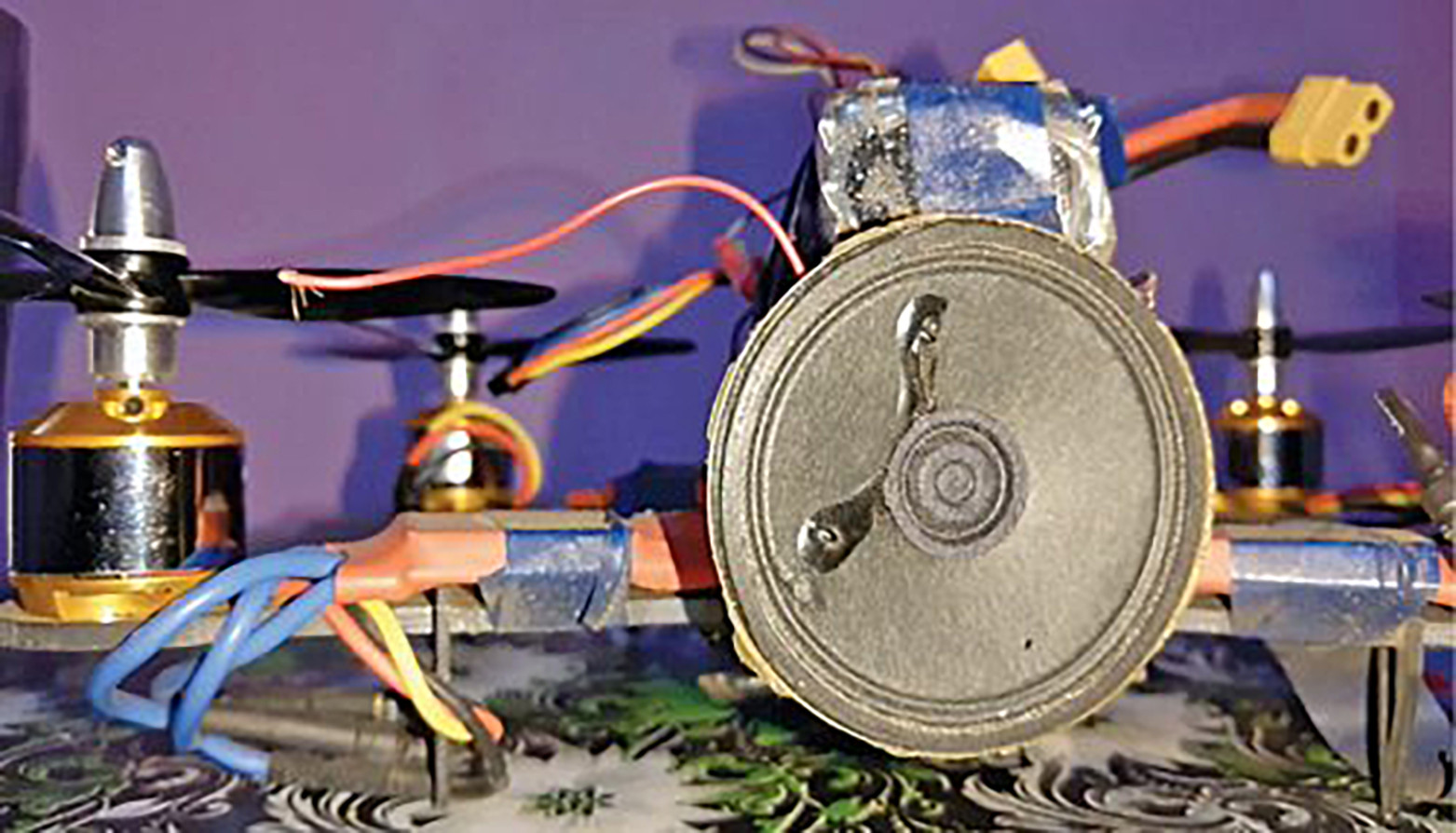
Utwórz kod (voice_recording.py) do nagrywania dźwięku przez Raspberrry Pi (rysunek 12). Uruchom kod nagrywania głosu na terminalu Raspberry Pi, a następnie naciśnij przycisk na Bonnecie, aby nagrać dźwięk do publicznego ogłoszenia. Uruchom kod, aby odtworzyć dźwięk, który chcesz ogłosić. W przeciwnym razie można po prostu odtworzyć nagrany plik za pomocą AIY Voice Bonnet. Głośnik dołączony do drona w celu publicznego ogłaszania jest pokazany na fotografii 13.
Teraz możesz latać dronem w obszarze, w którym chcesz wygłaszać publiczne komunikaty i odtwarzać dźwięk.