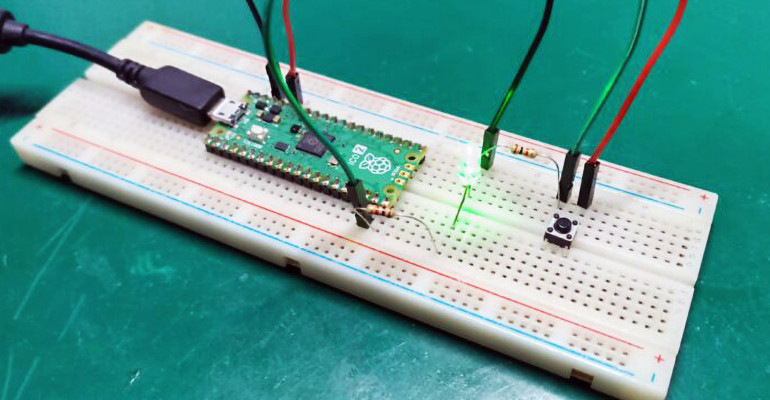

Jeśli chodzi o sprzęt, będziemy korzystać z Raspberry Pi Pico 2, ale można również użyć oryginalnego Pi Pico lub ESP32. Kod będzie działał na każdym sprzęcie obsługującym microPython. Prototyp będziemy montować na płytce prototypowej o 830 punktach. Jestem przekonany, że można to zrobić również na płytce o 400 punktach.
Wcześniej wspomniałem, że przerwania są sposobem na zagwarantowanie, że fragment kodu zostanie wykonany w odpowiednim momencie. W większości mikrokontrolerów występują dwa główne rodzaje przerwań: zewnętrzne (sprzętowe) i zegarowe. W tym samouczku poznasz oba rodzaje.
W przypadku wystąpienia przerwania, wykonywanie „głównego” kodu zostaje chwilowo zatrzymane i uruchamiana jest inna, specjalna jego część. Po krótkim wykonaniu tego "specjalnego" kodu, główny jest wznawiany. W naszym przypadku zostanie to wywołane przez zewnętrzny przycisk. Po naciśnięciu przycisku zaczniemy migać diodą LED. Po ponownym naciśnięciu przycisku dioda LED przestanie migać i tak dalej.
...