
Jak to działa?
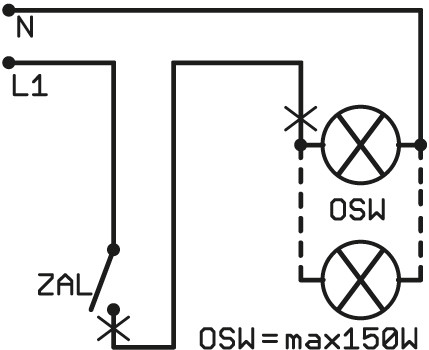
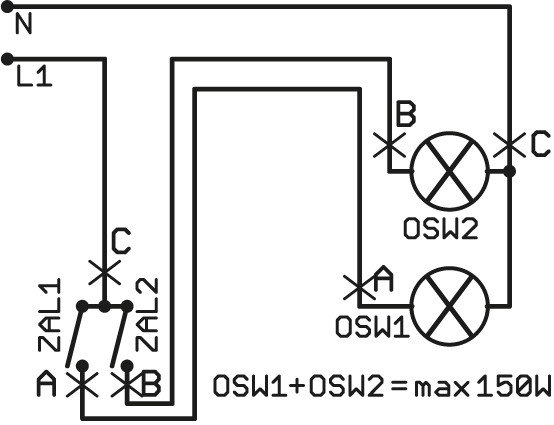
Rysunek 1 przedstawia układ elektryczny, natomiast rysunki 2 i 3 – sposób podłączenia.
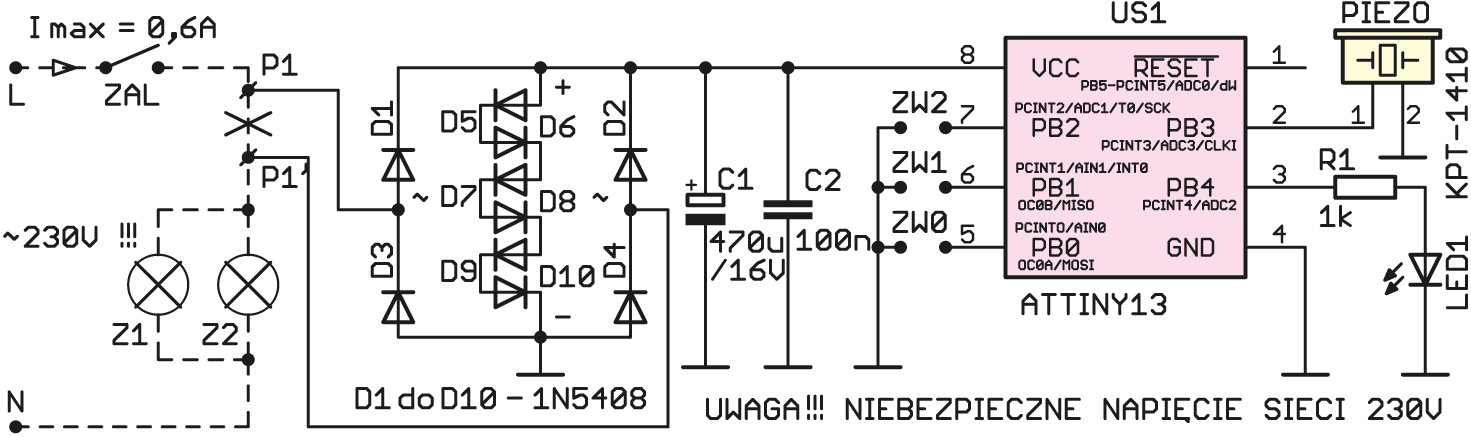
Schemat ideowy można podzielić na trzy bloki funkcjonalne. Pierwszy, narysowany linią przerywaną, to fragment instalacji oświetleniowej, do której szeregowo wpięty jest nasz sygnalizator. Ekopipek może być podłączany do napięcia TYLKO SZEREGOWO z innym odbiornikiem prądu. Na schemacie odbiornikami tymi są żarówki Z1 i Z2. Prąd płynący w obwodzie oświetleniowym przepływa przez sygnalizator, dostarczając mu zasilanie niezbędne do pracy. Drugi blok układu to elementy odpowiedzialne za zasilanie mikrokontrolera. Są to diody D1–D10 oraz kondensatory C1 i C2. Diody D1–D4 tworzą prostownik mostkowy, tak zwany mostek Graetza. Wyjścia „+” i „–” prostownika zwarte są przez diody D5-D10 pełniące funkcję diody Zenera o dużym prądzie. Prawie cały prąd, który wpływa na wejście przemienne prostownika, przepływa następnie przez szereg diod i wypływa z prostownika do żarówek. Spadek napięcia na pojedynczej diodzie krzemowej wynosi około 0,7V, co daje na szeregu diod D5–D10 około 4,2V, to w zupełności wystarcza do zasilenia procesora. Prąd pobierany z takiego zasilacza powinien być mniejszy od prądu płynącego w obwodzie oświetleniowym. Natomiast maksymalny prąd, jaki może płynąć przez EkoPipka zależy od zastosowanych w nim diod. W prezentowanym modelu zastosowałem 3-amperowe diody 1N5408, ale prąd pobierany przez żarówki nie powinien przekroczyć 0,6A, czyli łączna moc żarówek w monitorowanym obwodzie musi być mniejsza od 150W.
Uwaga! Mimo że na wyprowadzeniach zasilania procesora występuje napięcie 4,2V, to należy przestrzec młodszych Czytelników, że na całym układzie występuje napięcie sieci 230V, które jest niebezpieczne dla życia. Dlatego układ powinien mieć bezpieczną, izolowaną obudowę i po podłączeniu do sieci oświetleniowej nie wolno dotykać jego elementów. Ostatni blok sygnalizatora to procesor wytwarzający sygnały elektryczne, które poruszają blaszkę przetwornika piezoakustycznego. Do procesora podłączona jest dioda LED1, sygnalizująca miganiem stan i tryb pracy. Porty PB0, PB1 i PB2 przeznaczone są do konfiguracji rodzaju pracy urządzenia. Poprzez zwarcie lub rozwarcie tych portów do masy układ może pracować w kilku trybach. Program dla procesora napisany został w asemblerze i można go ściągnąć z Elportalu. Procesor po załączeniu ustawia używane rejestry i generuje króciutki sygnał, dając znać o rozpoczęciu pracy.
Następnie odmierza zadany czas, który może wynosić do 25 minut i generuje kolejny sygnał. Następnie kolejna pauza i następny sygnał. Podczas prac zastanawiałem się, czy układ ma po dłuższym czasie wyłączyć sygnalizację. Zdecydowałem jednak, że jako rasowy dręczyciel nie powinien odpuszczać, aż do momentu wyłączenia światła. Głośność dźwięków zależy od zastosowanej blaszki piezo – czym blaszka mniejsza, tym są one cichsze. W programie wpisane są trzy zestawy sygnałów, które mogą być odtwarzane kolejno po sobie lub zworką ZW0 można wybrać pojedynczy zestaw sygnałów do cyklicznego odtwarzania.
Montaż i uruchomienie
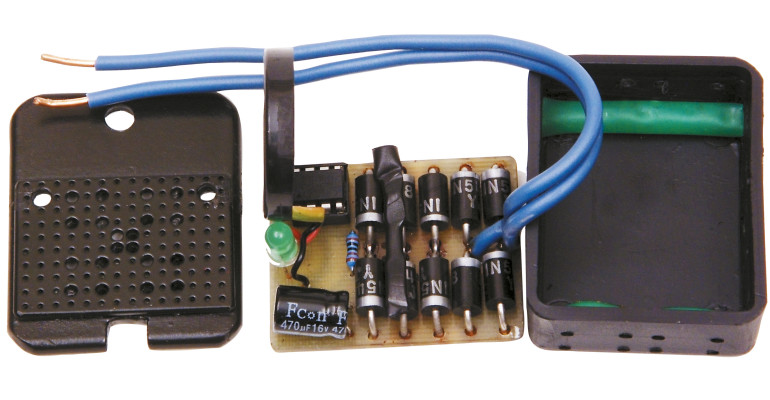
Na rysunku 4 przedstawiony jest schemat montażowy.
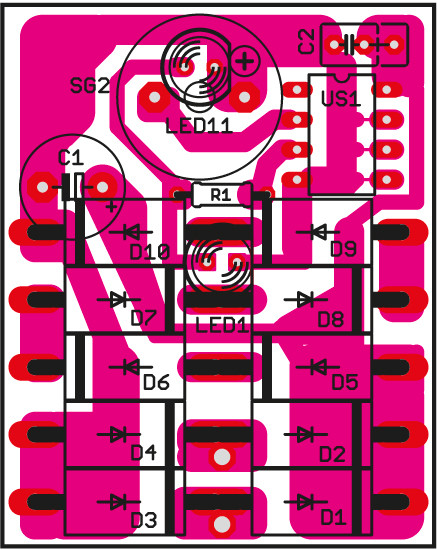
Płytka po lekkim dopiłowaniu pasuje do obudowy Z47. Montaż jest typowy. W celu konfiguracji i testów gotowego układu, można go podłączyć do zasilacza prądu stałego – o napięciu bezpiecznym dla użytkownika. Podłączenie wykonujemy szeregowo z żarówką lub rezystorem. Żarówkę lub rezystor oraz napięcie dobieramy tak, żeby prąd w obwodzie miał wartość około 0,5A. Uwaga na mocno grzejące się diody!
Mikrokontroler ATTiny13 przed zamontowaniem trzeba zaprogramować. Ważne jest, aby właściwie zaprogramować fusebity. W opcjach fusebitów zegar RC procesora ustawiamy na 4,8MHz i wyłączamy dzielenie częstotliwości zegara systemowego przez 8 (Divide clock by 8 ustawiamy na OFF). Układ kontroli napięcia BOODLEVEL musi być ustawiony na VCC = 2,7V. Dodatkowe informacje o sposobie montażu i uruchamiania układu można ściągnąć z Elportalu wraz z plikami kilku wersji programów do EkoPipka. Część parametrów pracy układu można zmieniać w programie. Oczywiście po dokonaniu zmian w kodzie źródłowym program należy skompilować ponownie. Po kompilacji otrzymamy plik wynikowy HEX z nowo wprowadzonymi parametrami. Kod kompilowany był programem AVR Studio 4.14.