
- Napińôcie zasilajńÖce: 7‚Ķ40 V.
- Maksymalny, cińÖgŇāy/impulsowy prńÖd silnika: 1,5 A/5 A.
- Zabezpieczenie przed przegrzaniem.
- PrńôdkoŇõńá obrotowa silnika regulowana w¬†256 krokach.
- Zmiana kierunku obrotów silnika.
- CzńôstotliwoŇõńá przebiegu PWM: okoŇāo 500¬†Hz.
- Wykrywanie przecińÖŇľenia.
- Sygnalizacja transmisji DMX.
- Sygnalizacja aktywnego kanaŇāu.
- Sygnalizacja przecińÖŇľenia kanaŇāu.
Jest on zasilany z tego samego napińôcia doprowadzonego do zŇāńÖcza J6, co silniki. Napińôcie zasilajńÖce musi zawierańá sińô w granicach 7‚Ķ40 V. W zasilaczu zastosowano ukŇāad scalony przetwornicy MC34063 (U1) w typowym ukŇāadzie aplikacyjnym. Dzińôki jego uŇľyciu nie jest wymagane uŇľycie radiatora, nawet wtedy, gdy urzńÖdzenie jest zasilanie napińôciem maksymalnym (+40 V). Dioda D1 zabezpiecza stabilizator przed skutkami zamiany polaryzacji zapińôcia zasilajńÖcego.
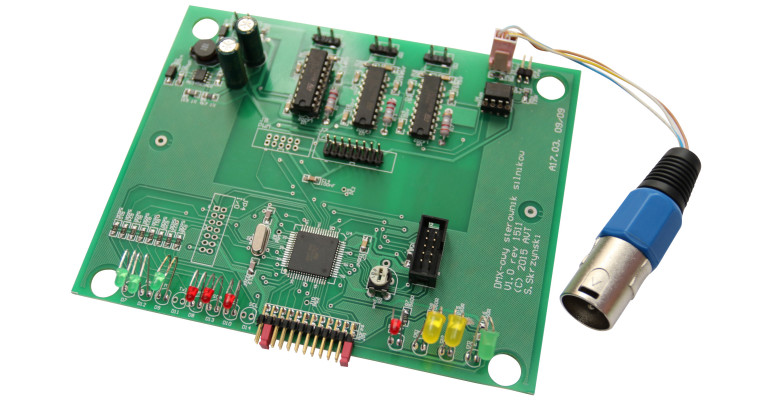
Dane DMX sńÖ odbierane za pomocńÖ typowego drivera interfejsu R485 ‚Äď ukŇāadu scalonego MAX485 (U6). MoŇľna zastosowańá taŇĄsze odpowiedniki np. AD485, ST485. Autor artykuŇāu ma natomiast zŇāe doŇõwiadczenia z SN75176, kt√≥rych prńôdkoŇõńá transmisji byŇāa niewystarczajńÖca. Zwora JP3 umoŇľliwia zaŇāńÖczenie rezystora-terminatora linii. Mikrokontroler ATmega128 (U4) dekoduje dane DMX i odpowiednio steruje stopnie mocy za pomocńÖ przebiegu PWM. Wykorzystano trzy sprzńôtowe generatory PWM, kt√≥rych to ATmega128 zawiera aŇľ szeŇõńá. Dzińôki temu jest Ňāatwo rozbudowańá sterownik o kolejne trzy kanaŇāy. Mikrokontroler kontroluje pob√≥r prńÖdu przez silniki. W razie przekroczenia dopuszczalnego zakresu wybrany kanaŇā zostaje zablokowany, nie dopuszczajńÖc do uszkodzenia stopnia mocy.
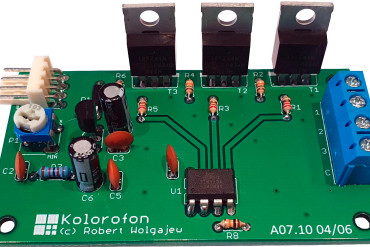
Bufory sterujńÖce silnikami zbudowano na ukŇāadach L6202 w obudowie DIP18. Bez stosowania radiator√≥w mogńÖ one dostarczańá do 1,5 A cińÖgŇāego prńÖdu obcińÖŇľenia i do 5 A w impulsie. Wszystko to za sprawńÖ zastosowania tranzystor√≥w MOS o maŇāej rezystancji kanaŇāu. UkŇāad ma wbudowane diody tŇāumińÖce przepińôcia powstajńÖce w momencie wyŇāńÖczania indukcyjnoŇõci i ‚Äď w przeciwieŇĄstwie do L298 ‚Äď nie trzeba dodawańá ich na zewnńÖtrz. Ponadto, L6202 ma wbudowane zabezpieczenie przed przegrzaniem. Ze wzglńôdu na to, Ňľe w mostku ukŇāadu drivera wszystkie tranzystory majńÖ kanaŇā N, staŇāo sińô konieczne wytworzenie napińôcia wyŇľszego od napińôcia zasilania, aby wysterowańá tranzystory w g√≥rnej gaŇāńôzi mostka. Problem rozwińÖzuje obw√≥d bootstrap (znany z dawnych wzmacniaczy audio, np. UL1480), kt√≥ry wymaga doŇāńÖczenia kondensator√≥w do wyprowadzeŇĄ 11 i 17 ukŇāadu. Obw√≥d RC na wyjŇõciu bufora stanowi dodatkowe zabezpieczenie (sztuczne obcińÖŇľenie), jak ma to miejsce w ukŇāadach wzmacniaczy audio.
MontaŇľ i uruchomienie
MontaŇľ jest typowy i nie wymaga szczeg√≥Ňāowego omawiania. Na poczńÖtek nie zalecam montowania mikrokontrolera i ukŇāadu MAX485, pod kt√≥ry warto zastosowańá podstawkńô precyzyjnńÖ. UkŇāady L6202 naleŇľy wlutowańá bezpoŇõrednio w pŇāytkńô, bez podstawek. Spowodowane jest to tym, Ňľe n√≥Ňľki 4‚Ķ6 i 13‚Ķ15 odprowadzajńÖ ciepŇāo z ukŇāadu. Dlatego ŇõcieŇľki doprowadzone do tych n√≥Ňľek sńÖ takie grube, a nie z powodu pŇāynńÖcych tam prńÖd√≥w.
W pierwszej kolejnoŇõci uruchamiamy zasilacz. JeŇõli napińôcie jest poprawne (+5 V), moŇľna wlutowańá mikrokontroler i umieŇõcińá MAX485 w podstawce. Mikrokontroler dostarczany w zestawie jest juŇľ zaprogramowany. JeŇõli chcemy zrobińá to samodzielnie, naleŇľy ustawińá fuses. Szesnastkowo:
Extended = 0xFE,
High = 0x99,
Low = 0x7F.
Nastńôpnie doprowadzamy sygnaŇā DMX do zŇāńÖcza J4. WczeŇõniej zworkami na JP1 naleŇľy ustalińá adres urzńÖdzenia (opis w tabelce w dalszej czńôŇõci artykuŇāu). ObserwujńÖc diody LedDMX i LedST (opis w dalszej czńôŇõci artykuŇāu) wnioskujemy czy urzńÖdzenie odbiera sygnaŇā DMX. JeŇõli nie, to najprawdopodobniej zamienione sńÖ wyprowadzenia na zŇāńÖczu XRL. JeŇõli odbi√≥r jest poprawny, to przyŇāńÖczamy silniki do zŇāńÖcz J1‚Ķ J3.