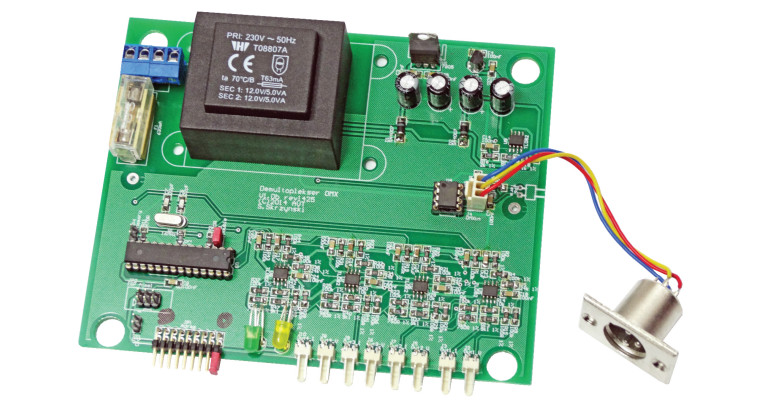

- 4 wyjścia napięciowe 0…10 V, 4 wyjścia prądowe 0…20 mA
- Adres ustawiany w zakresie 0…512
- Interfejs DMX
- Mikrokontroler ATmega168
- Pasuje do typowej obudowy KM-60
Zasilacz dostarcza napięcia niestabilizowanego ±15 V na potrzeby wzmacniaczy operacyjnych oraz stabilizowanego +5 V dla mikrokontrolera i nadajnika MAX485. Ponadto, ze stabilizowanego przez układ U1 napięcia ujemnego jest wytwarzane przez U9A napięcie –4 V wykorzystywane przez przetworniki napięcie/prąd. Sygnał DMX doprowadzony do J4 jest konwertowany do poziomu TTL za pomocą układu U4. Złącze JP6 umożliwia włączenie terminatora w linię w sytuacji, gdy demultiplekser jest ostatnim urządzeniem w sieci DMX. Na JP1 ustawiamy adres demultipleksera. Zajmuje on kolejne cztery adresy, podobnie jak sterownik serwomechanizmów. Odebrane dane DMX są dekodowane przez mikrokontroler i ustawiają odpowiednio generatory PWM. Dalsza droga sygnału zostanie omówiona na przykładzie pierwszego kanału, pozostałe działają w ten sam sposób.
Sygnał PWM z wyprowadzenia 15 mikrokontrolera (etykieta OC1A) jest uśredniany za pomocą filtru RC (rezystor R1, kondensator C13). Na wyjściu filtru może pojawić się napięcie z zakresu 0…5 V, dlatego jest ono dwukrotnie wzmacniane przez U5A. Sygnał napięciowy z zakresu 0…10 V jest dostępny na wyprowadzeniu J2. Ten sam sygnał jest kierowany do przetwornika napięcie/prąd. Konwerter napięcie/prąd to w istocie sterowane źródło prądowe. Poważną wadą tych rozwiązań jest to, że rezystancja obciążenia musi być „pływająca”. Jeśli obciążenie ma być podłączone do masy, można zastosować pompę prądową Howlanda. Przy dużych wartościach rezystancji obciążenia wzmacniacz operacyjny musi dostarczyć prąd dużo większy, niż płynący przez obciążenie. Ponadto układ ma dużo większą rezystancję wejściową. W demultiplekserze zastosowano jeszcze jedną modyfikację. Rezystor R6 dołączono do napięcia odniesienia –4 V zamiast do masy. Dzięki temu oraz odpowiedniemu dobraniu wartości rezystancji R5, uzyskano na wyjściu prąd w zakresie 4…10 mA, zamiast 0…10 mA.