
Budowa modułu
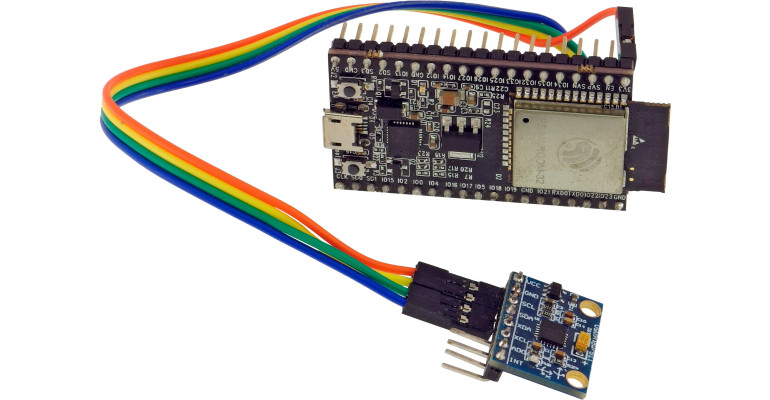
Na płytce modułu znajduje się układ scalony MPU6050 oraz układ stabilizatora LDO pozwalający rozszerzyć dopuszczalne napięcie zasilania do zakresu 3,3...5 V. Dodatkowo na płytce zamontowano oporniki podciągające linie magistrali I²C do napięcia zasilającego oraz opornik ustawiający na wyprowadzeniu wyboru adresu AD0 poziom niski. Wszystkie sygnały są dostępne na 8-stykowym gnieździe.
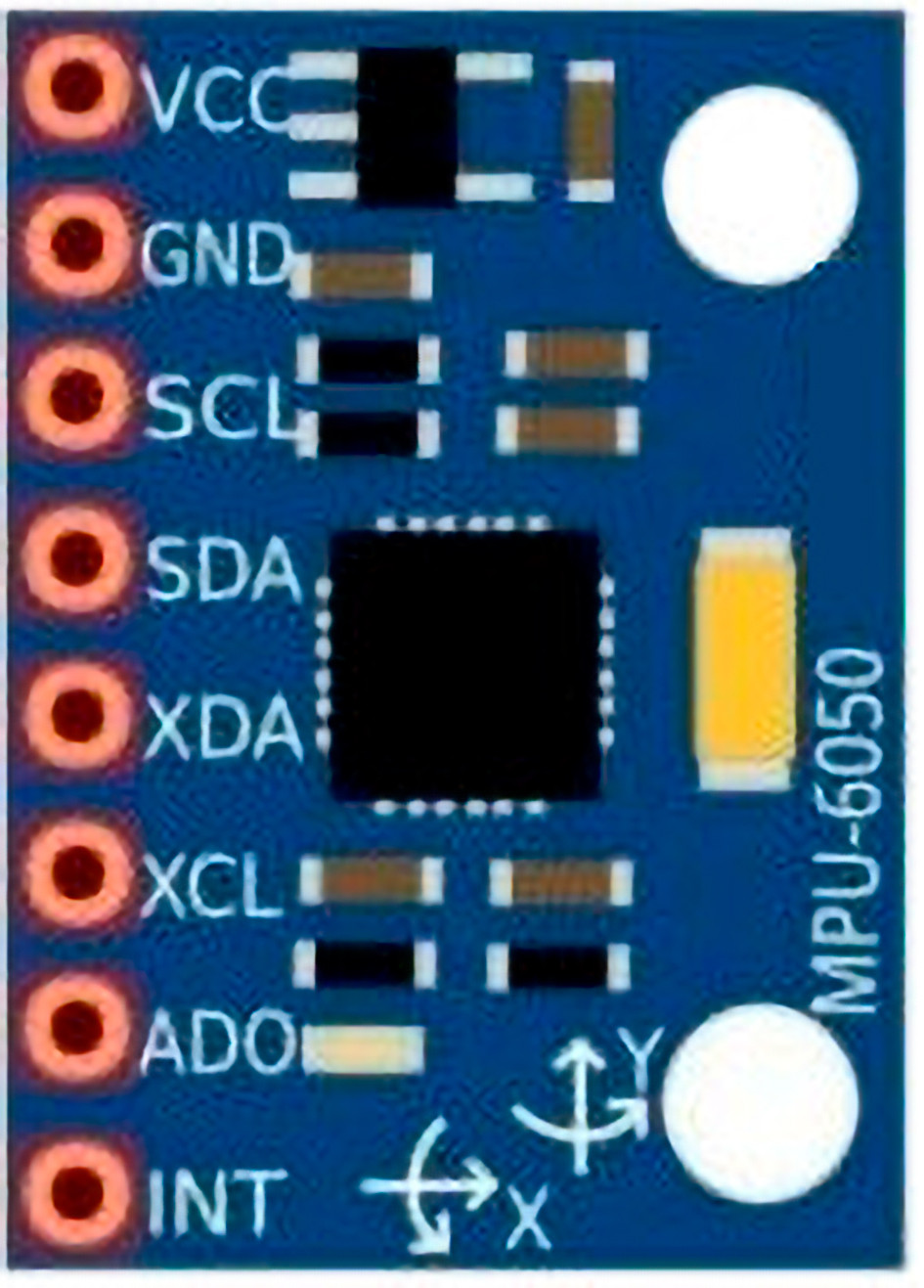
Na rysunku 1 został pokazany wygląd płytki modułu i rozmieszczenie kluczowych elementów. Oznaczenia i funkcje poszczególnych wyprowadzeń są następujące:
- VCC – plus zasilania 3,3...5 V,
- GND – masa zasilania,
- SCL – linia zegarowa magistrali I²C podciągnięta do VCC,
- SDA – linia danych magistrali I²C podciągnięta do VCC,
- XDA – linia danych dodatkowej niezależnej magistrali I²C,
- XCL – linia zegara dodatkowej niezależnej magistrali I²C,
- ADO – wejście wyboru adresu, na który będzie reagował moduł w obrębie głównej magistrali I2C (dla poziomu niskiego będzie to adres 0x68, dla poziomu wysokiego (3,3 V) 0x69. Linia jest podciągana do poziomu niskiego poprzez opornik na płytce modułu),
- INT – wyjście przerwania, może być zaprogramowana do wystawiania stanu niskiego w przypadku wystąpienia zdarzenia np. przekroczenia poziomu przyśpieszenia.
Działanie modułu
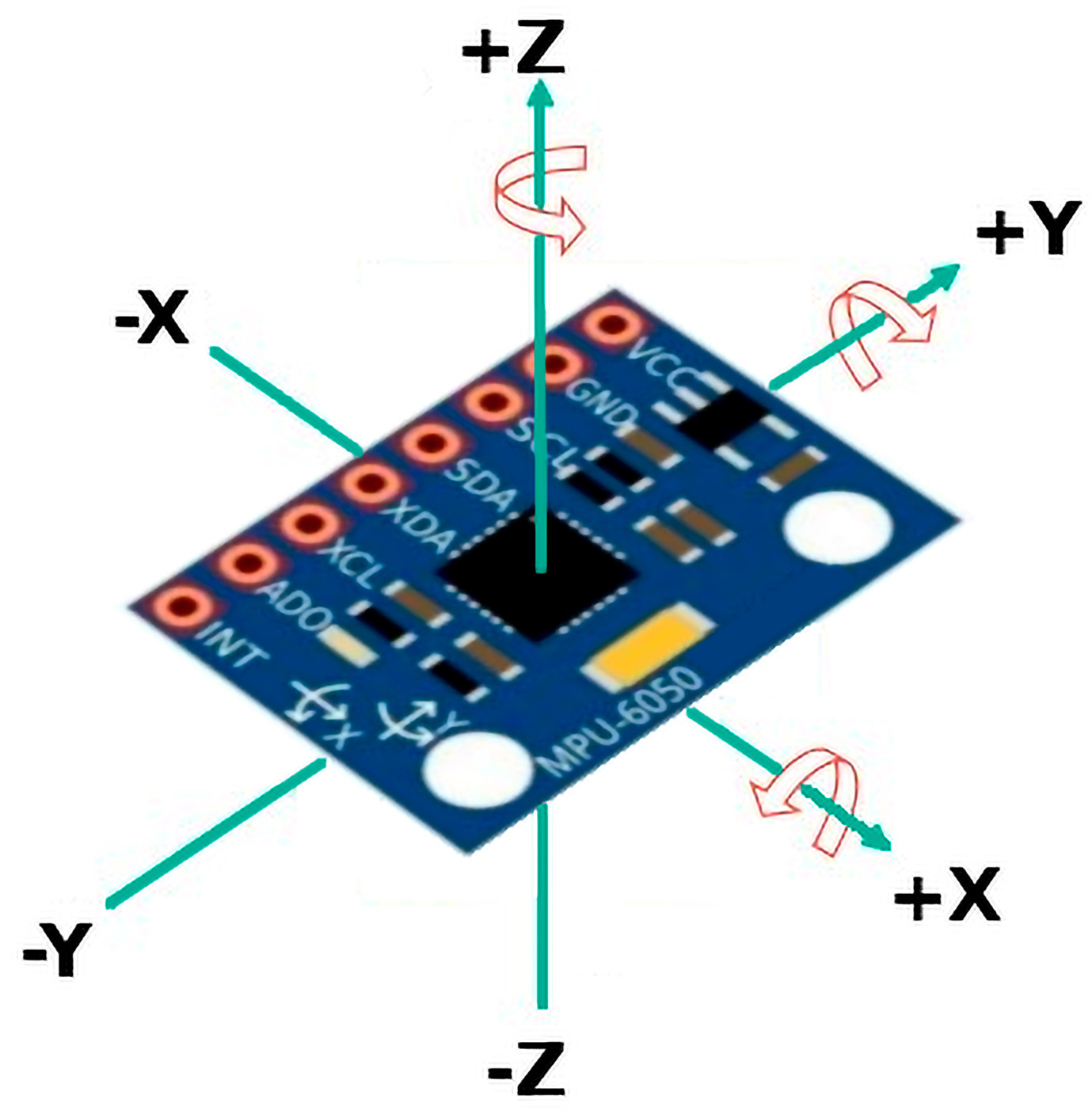
Zamontowany na płytce modułu układ scalony MPU6050 zawiera struktury MEMS (Micro Electro Mechanical Systems) pełniące funkcję półprzewodnikowych żyroskopów i akcelerometrów. Czujniki układu odgrywające rolę akcelerometrów mierzą w 3 osiach wartość przyśpieszenia, a czujniki żyroskopów mierzą rotację. Na rysunku 2 zielonymi liniami zaznaczono orientację poszczególnych osi względem płytki. W takim położeniu jak na rysunku 2, gdy moduł pozostaje w bezruchu, akcelerometr osi Z powinien zmierzyć wartość około 9,81 m/s² co odpowiada średniemu przyśpieszeniu ziemskiemu, natomiast akcelerometry osi X i Y powinny podawać wartości bliskie 0 m/s². Odwrócenie płytki „do góry nogami” skutkuje odczytem wartości ujemnej – 9,81 m/s² zmierzonej w osi Z. Każde przesunięcie płytki np. w kierunku +X spowoduje pomiar w tej osi chwilowego przyśpieszenia o wartości dodatniej, proporcjonalnego do prędkości ruchu płytki. Z kolei w czasie obracania płytki wokół zaznaczonych osi żyroskopy zmierzą ten obrót w jednostkach stopni kątowych na sekundę.
Uzyskiwane w czasie pomiarów sygnały analogowe akcelerometrów i żyroskopów są poddawane obróbce w wewnętrznych przetwornikach ADC i jako wartości cyfrowe są dostępne do odczytu z rejestrów układu MPU6050.