W artykule wyjaśniono, w jaki sposób płytka została zaprojektowana, uzasadniono podjęte decyzje projektowe i wskazano, jak płytka odpowiada na różne wymagania poszczególnych aplikacji. Takie gotowe rozwiązanie referencyjne pomaga inżynierom szybciej rozpocząć własne prace projektowe i skrócić czas potrzebny na wprowadzenie na rynek gotowych, dobrze przemyślanych rozwiązań, ograniczając wysiłki wkładane w projektowanie i weryfikację.
Bezszczotkowe silniki stałoprądowe
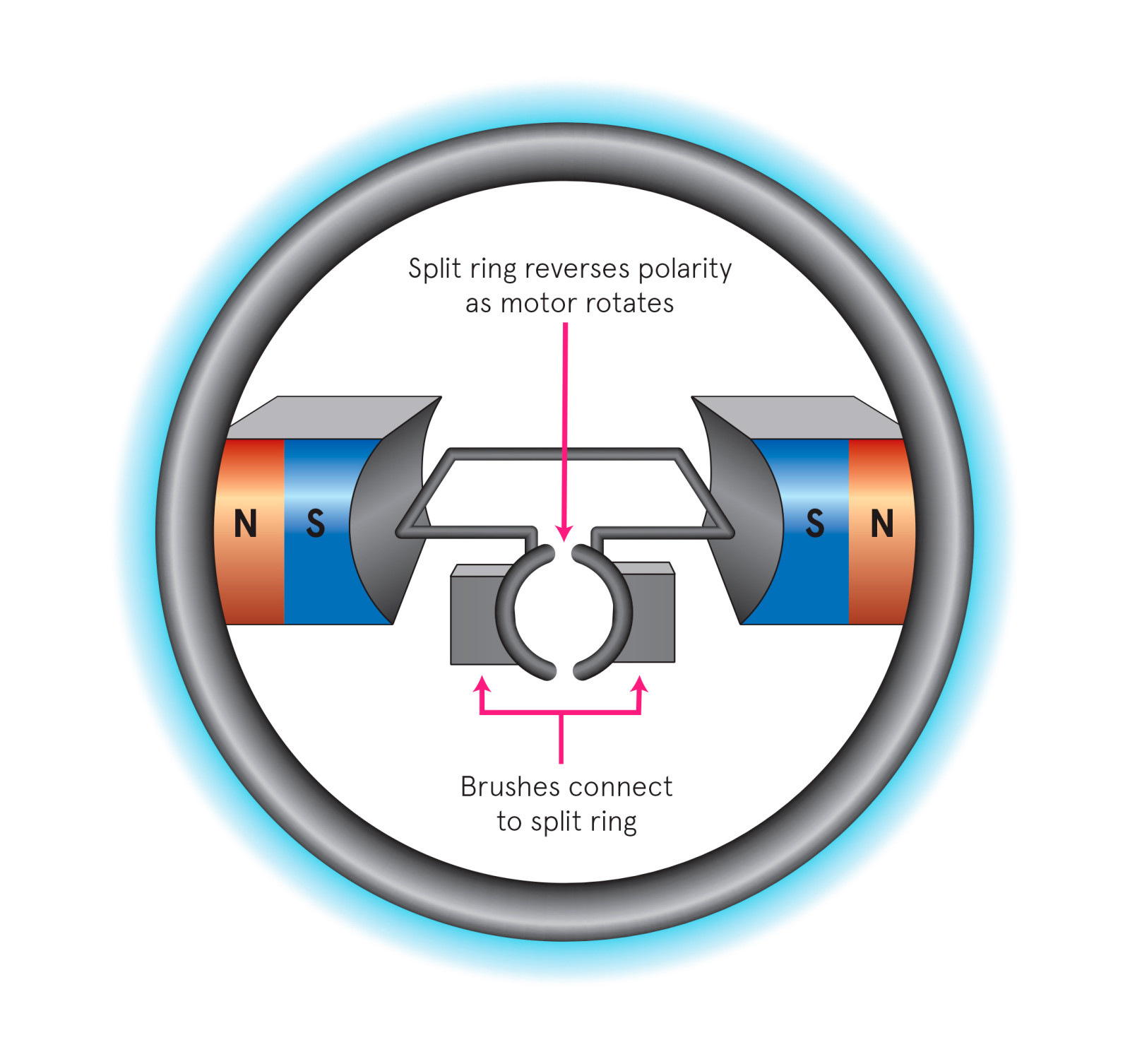
Silniki stałoprądowe znane są już od czasów Michaela Faradaya, Josepha Henry’ego i Andrew Gordona, a więc od lat 40. XVIII wieku, kiedy to zademonstrowano, że prąd przepływający przez przewód w polu magnetycznym powoduje powstawanie siły. Pomimo tych wczesnych badań, dopiero w latach 80. XIX wieku silniki tego typu weszły do komercyjnego użycia. Pierwsze z silników miały szczotki. To dlatego, że konieczne jest by co 180° odwracać polaryzację prądów, aby wirnik obracał się cały czas w tę samą stronę. Szczotki utrzymują kontakt z rozdzielonym komutatorem, co pozwala właśnie na zmianę kierunku przepływu prądu wewnątrz przewodnika (rysunek 1). Kontakt mechaniczny jest realizowany z użyciem szczotek, ale to znowu sprawia, że generowane są duże ilości zakłóceń elektromagnetycznych (EMI) oraz powstaje iskrzenie. Żywotność silnika spada ze względu na stopniowe ścieranie się szczotek i samego komutatora.