Nawigacja precyzyjna to złożony system, co do tej pory generowało wysokie koszty implementacji w urządzeniu końcowym. Jednak w ostatnim czasie pojawiły się rozwiązania spełniające wysokie wymagania dostępne dla tak popularnych aplikacji jak np.:
- pojazdy autonomiczne, np. kosiarki operujące na precyzyjnie wyznaczonym terenie, trafiające do stacji bazowej,
- roboty autonomiczne,
- pojazdy rolnicze wymagające precyzji np. nawożenia czy siewu,
- samochody, ciężarówki, minibusy, w tym autonomiczne,
- maszyny budowlane,
- drony.
SPG vs. HPG
Nawigacja standardowej precyzji – SPG, oznacza dokładność rzędu 1,0...2,5 metrów CEP, przy sygnałach dobrej jakości i markowych odbiornikach. Słabe sygnały z satelitów (100 tysięcy razy słabsze od sygnału GSM), przebywają dystans tysięcy kilometrów są zniekształcane przez zmienne, niemożliwe do przewidzenia czynniki (np. wilgotność i ciśnienie w troposferze, wyładowania w jonosferze, odbicia itp.).
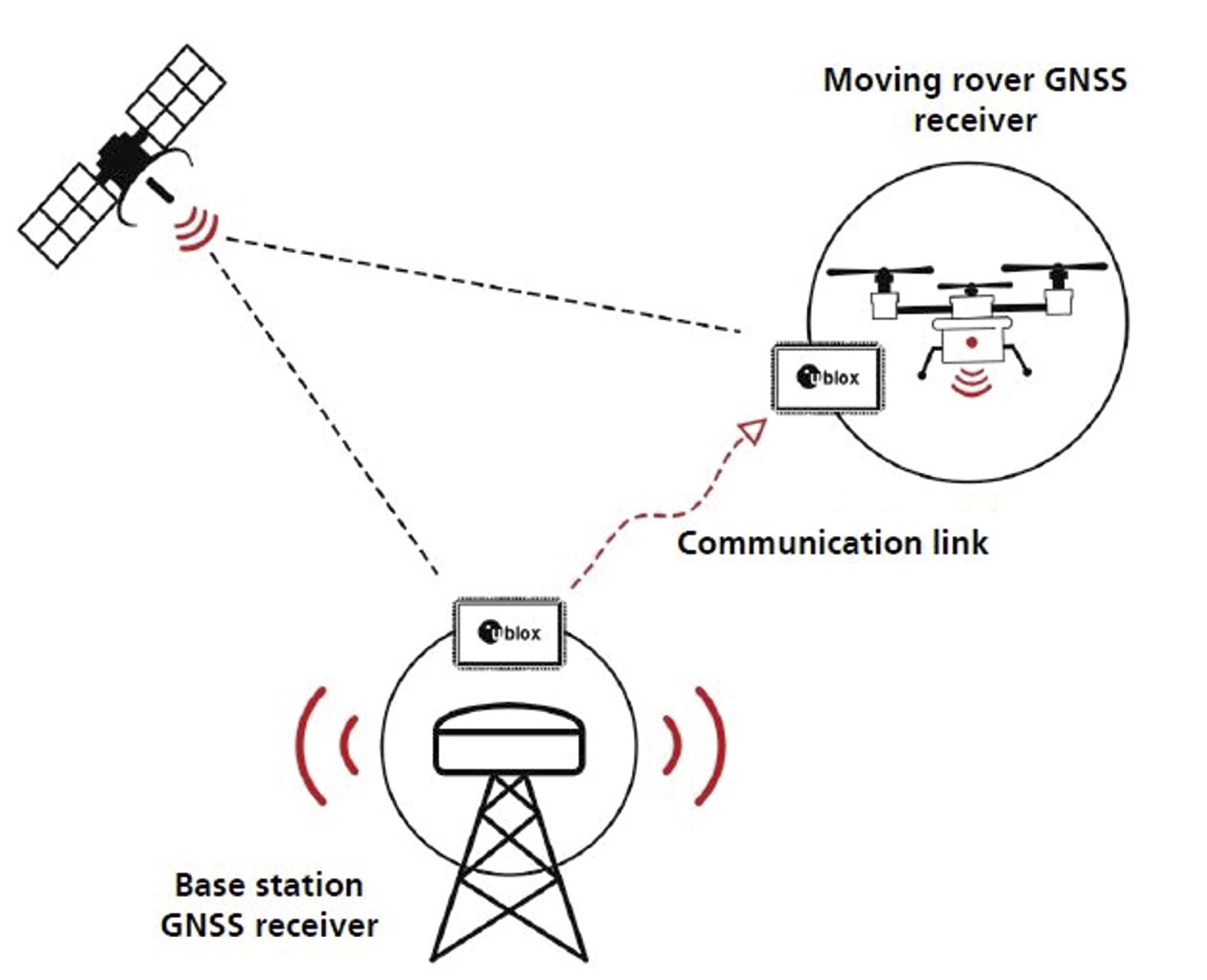
Nawigacja wysokiej precyzji – HPG, czyli precyzji centymetrowej, wymaga systemu korygującego, eliminującego wpływ opisanych czynników. Stacja referencyjna o znanych współrzędnych na bieżąco porównuje pozycję GNSS z rzeczywistą i przesyła korekty do odbiorników. W ten sposób eliminuje się błędy wynikające z przebiegu sygnału i uzyskuje dokładność centymetrową. Dane korygujące muszą być dostarczane w czasie rzeczywistym, mogą być generowane na kilka sposobów:
- Własna stacja referencyjna, przekazująca poprawki RTK do odbiornika w pobliżu (odległość <30 km);
- Regionalna sieć stacji referencyjnych, oferujących dane RTK najczęściej odpłatnie. Stacja powinna znajdować się blisko odbiornika, pracuje w standardzie OSR i wymaga komunikacji dwukierunkowej – odbiornik informuje o położeniu, żeby uzyskać korekty od najbliższej stacji, korekty są pomocne tylko lokalnie, w jej pobliżu;
- Stacja referencyjna PPP-RTK, o pokryciu kontynentalnym lub globalnym, komunikacja jest jednokierunkowa od stacji do odbiornika np. w formacie SPARTN, csRR. Pracuje w najnowszym standardzie SSR, dane są ważne na kontynencie, odbiornik nie musi znajdować się w pobliżu stacji.
Prosty w implementacji system HPG
Niedawno, przystępny cenowo i prosty w implementacji system HPG stał się wreszcie dostępny, jego składniki można opisać posługując się produktami pioniera technologii HPG – szwajcarskiej firmy u-blox. Są to:
- Sygnały z kilku konstelacji GNSS: GPS, Galileo, Glonass, BeiDou, QZSS;
- Odbiornik HPG gwarantujący albo zapewniający najwyższej jakości parametry, ale także dopracowywane przez wiele generacji i sprawdzone algorytmy. Moduły NEO-F9P oraz ZED-F9P firmy u-blox obsługują równolegle cztery konstelacje GNSS, oraz dwa pasma: L1/L2 lub L1/L5. Stosując technologię opartą ma doświadczeniu firmy u-blox dostarczają informację o położeniu wysokiej precyzji. Zoptymalizowana cena, wymiary 12×16 mm i niski pobór energii umożliwiają zastosowanie tych odbiorników w aplikacjach dotychczas niedostępnych. Moduły wspierają wszystkie wymienione rodzaje korekt.
- Poprawki ze stacji referencyjnych. PointPerfect to wygodny system niedawno wprowadzony przez u-blox. Pracuje w standardzie SSR, z formatem danych SPARTN. Ta nowoczesna implementacja pracuje z jednostronną komunikacją do odbiornika. PointPerfect jest natywnie wspierany przez moduły NEO-F9P oraz ZED-F9P. Poprawki mogą być pobierane z serwera poprzez dostęp IP jak i z satelitów przez dostęp L-Band (np. przy braku dostępu do internetu i sieci komórkowej). 40 godzin miesięcznie danych IP jest darmowe, a stawka 3,90 USD przy 60 godzinach czy np. 6,80 USD przy 120 godzinach to bardzo przystępne ceny, dane są ważne na całym kontynencie.
- Wysokiej jakości dwupasmowa antena HPG, na przykład ANN-MB u-blox, dopełnia całość.
Ważnym parametrem HPG jest czas dostrajania się odbiornika do korekt (np. po zaniku sygnału). W przypadku połączenia modułów firmy u-blox oraz PointPerfect, są to zaledwie sekundy.
Dostępna jest także funkcja tzw. lokalnej bazy, która otwiera ciekawe możliwości, np.:
- określanie precyzyjnego (0,4 stopnia) kierunku ruchu pojazdu,
- moving base – precyzyjne określenie wektora pomiędzy odbiornikiem a ruchomą stacją, przydatne np. przy śledzeniu pojazdu przez drona (follow me), albo lądowaniu na poruszającej się platformie.
Co ciekawe, dostępne są pinowo zgodne moduły ZED-F9R, integrujące HPG z IMU (żyroskop, akcelerometr), określające pozycję nawet bez widoczności satelitów.
Podsumowanie
Określanie położenia z centymetrową dokładnością stało się przystępne. Pomimo skomplikowanej technologii implementacja jest prosta, jednak wybór optymalnej architektury oraz funkcjonalności wymaga doświadczenia. Sugerujemy kontakt z zespołem wyszkolonych przez producenta specjalistów, używając adresu ubloxFAE@microdis.net.