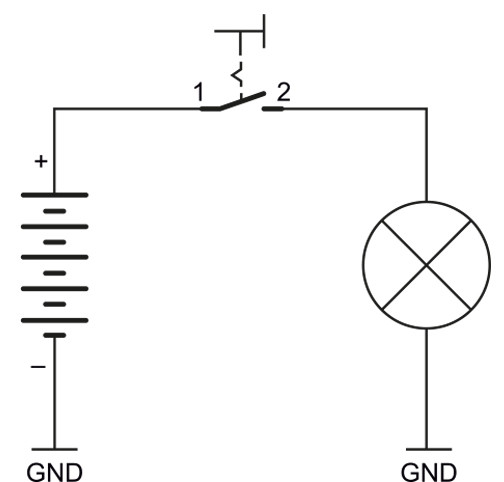
Rozważmy taką sytuację: źródło napięcia stałego o wartości kilkudziesięciu (lub nawet kilkuset) woltów zasila odbiornik. Ten odbiornik musi mieć stałe połączenie masy zarówno ze źródłem napięcia, jak i z innymi elementami obwodu, więc pozostaje wyłączanie jedynie dodatniego potencjału zasilania, tzw. sterowanie high side. Schematycznie tę sytuację ilustruje rysunek 1.
Najprostszym rozwiązaniem byłoby użycie przekaźnika, gdyż jego styki są odizolowane galwanicznie od cewki, więc mogą przełączać (niemal) dowolne potencjały. Za to musimy pożegnać się wtedy z szybkim i cichym przełączaniem, niezawodnością oraz sterowaniem PWM. Aby uzyskać takie funkcjonalności, trzeba użyć tranzystora. W najprostszym wydaniu będzie to tranzystor MOSFET-P podłączony w konfiguracji wspólnego źródła. Polaryzując jego bramkę potencjałem niższym niż źródło, można go załączyć, a sprowadzając UGS do zera – wyłączyć. Proszę spojrzeć na rysunek 2, a ja zapytam retorycznie – czego tu brakuje?
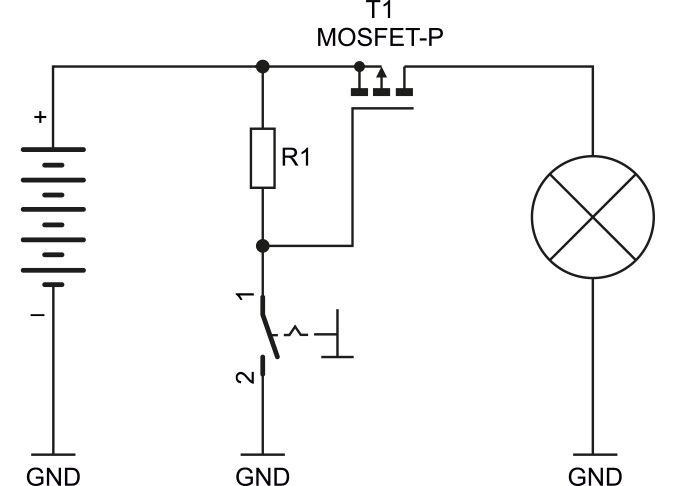
Po pierwsze, napięcie przełączane nie może przekraczać wartości UGSmax tego tranzystora, czyli typowo 20 V. Po drugie, o ile załączanie tranzystora będzie szybkie (niska rezystancja klucza), o tyle za wyłączanie jest odpowiedzialny R1, przez co ten proces będzie trwał nieporównywalnie dłużej. Po trzecie – chyba najważniejsze – nie ma tutaj żadnego zabezpieczenia przed przekroczeniem dopuszczalnego napięcia bramka-źródło. Nawet krótkotrwała „szpilka” wyższego napięcia może uśmiercić ten tranzystor.
Na rysunku 3 znajduje się schemat udoskonalonego układu z rysunku 2. Dioda Zenera D1 chroni izolator podbramkowy przed przebiciem wywołanym przekroczeniem UGSmax. Rezystor R2 ogranicza de facto prąd tej diody, jeżeli napięcia wejściowe przekroczyłoby jej napięcie przebicia. Niestety, spowalnia on proces załącza tranzystora T1. Wyłączanie również jest powolne, nadal realizuje je R1.
Jeżeli nie wymagamy szybkiego przełączania elementu wykonawczego, to takie rozwiązanie jest akceptowalne. Jednak ma ono jeszcze jedno ograniczenie: jeżeli napięcie wejściowe zmienia się w bardzo szerokim zakresie – źródłem jest, na przykład, turbina wiatrowa, moduł fotowoltaiczny lub bateria akumulatorów – to w szerokim zakresie zmienia się prąd diody D1 oraz moc wydzielana na R2. Można użyć „przewymiarowanych” elementów, ale to mało eleganckie rozwiązanie zajmuje sporo miejsca i wydziela dużo ciepła.
Natomiast na rysunku 4 możemy zobaczyć znacznie doskonalszą wersję tego układu, z dokładnie takim samym zestawem elementów, ale zachowującą się w bardziej przewidywalny sposób. Jedyną różnicą jest zamiana miejscami T2 z R2.
Powstało w ten sposób sterowane źródło prądowe, które pobiera prąd o natężeniu około 4,3 mA, kiedy potencjał wyjścia mikrokontrolera sterującego jest wysoki lub 0 mA. Potencjał źródła tranzystora T1 może teraz zmieniać się w bardzo szerokim zakresie, a nawet bardzo szybko (np. może tętnić), a my mamy gwarancję, że przez diodę D1 popłynie nie więcej niż 4,3 mA.
Czy to jest rozwiązanie idealne? Nie. Czego tu brakuje? Szybkości. Jak ją uzyskać? Najlepiej poprzez zastosowanie odpowiedniego sterownika. Tyle że układy driverów high side są zazwyczaj dosyć drogie, zaś w wersji z pompą ładunkową wymagają ciągłego kluczowania, co uniemożliwia otwarcie klucza tranzystorowego na stałe. Ale gdyby taki zwykły driver low side... podwiesić na wysokim potencjale? Dodajemy do tego kilka elementów i mamy schemat z rysunku 5. Driver tranzystorów MOSFET typu MIC4420 – potężny, bo umożliwia przepływ prądu o natężeniu do 6 A – jest zasilany napięciem 15 V, którego dostarcza dioda D1. Kondensatory C1, C2 i C3 zmniejszają impedancję wewnętrzną takiego źródła zasilania. Tranzystor T3 pełni funkcję źródła prądowego, które zasila tę część obwodu prądem o natężeniu około 16 mA. I to niezależnie od potencjału, na jakim znajduje się katoda diody D1.
W porządku, a co z sygnałem sterującym? Jego również dostarcza źródło prądowe, tyle że na tranzystorze T2. Kiedy wymusza ono prąd o natężeniu około 4,3 mA, to na rezystorze R2 odkłada się około 16,8 V, co układ MIC4420 zinterpretuje jako logiczne „0” i wystawi na swoim wyjściu stan niski, otwierając tranzystor T1. Wejście tego układu akceptuje napięcie ujemne (do 5 V poniżej potencjału masy), więc „naddatek” rzędu 1,8 V poniżej jego linii GND nie spowoduje uszkodzenia, a zapewni przełączanie nawet przy lekkim wzroście napięcia przewodzenia diody D1.
Ten układ ma prawo pracować szybko, ponieważ za wysterowanie bramki tranzystora MOSFET jest odpowiedzialny specjalizowany driver. Tranzystor T2 nie wchodzi w stan nasycenia. Rezystor R2 przeładowuje bardzo niską pojemność wejściową drivera (6 pF dla MIC4420). Dodatkowo napięcie przełączane może mieć nawet silnie tętnienia i nie wpłynie na działanie układu sterującego mikrokontrolera – jest odizolowany od tych tętnień bardzo małą pojemnością Cjc aktywnego tranzystora (kilka pikofaradów).
W tym układzie występuje efekt Millera, który spowalnia przełączanie tranzystora T2. Można byłoby go w znacznej mierze usunąć, dodając „nad” T2 drugi tranzystor, w układzie wspólnej bazy, tworząc kaskadę. To pozwoli walczyć o naprawdę wysokie częstotliwości kluczowania.
Michał Kurzela, EP